Fast Visual Object Tracking with Rotated Bounding Boxes
基于旋转边界框的快速视觉目标跟踪
Abstract
摘要
In this paper, we demonstrate a novel algorithm that uses ellipse fitting to estimate the bounding box rotation angle and size with the segmentation(mask) on the target for online and real-time visual object tracking. Our method, SiamMask E, improves the bounding box fitting procedure of the state-of-the-art object tracking algorithm SiamMask and still retains a fast-tracking frame rate (80 fps) on a system equipped with GPU (GeForce GTX 1080 Ti or higher). We tested our approach on the visual object tracking datasets (VOT2016, VOT2018, and VOT2019) that were labeled with rotated bounding boxes. By comparing with the original SiamMask, we achieved an improved Accuracy of $65.2%$ and $30.9%$ EAO on VOT2019, which is $5.6%$ and $2.6%$ higher than the original SiamMask.The implementation is available on GitHub: https://github.com/ baoxinchen/siammask_e.
本文展示了一种新颖算法,该算法利用椭圆拟合技术,通过目标分割掩码(mask)在线实时估计视觉目标跟踪中的旋转边界框角度与尺寸。我们的方法SiamMask E改进了当前最先进目标跟踪算法SiamMask的边界框拟合流程,同时在配备GPU(GeForce GTX 1080 Ti或更高)的系统上仍保持80 fps的高速跟踪帧率。我们在标注旋转边界框的视觉目标跟踪数据集(VOT2016、VOT2018和VOT2019)上测试了该方法。与原始SiamMask相比,在VOT2019上实现了65.2%的精度提升和30.9%的EAO指标,分别比原版高出5.6%和2.6%。代码实现已发布于GitHub:https://github.com/baoxinchen/siammask_e。
1. Introduction
1. 引言
Visual object tracking is an important element of many applications such as person-following robots ([6] [5] [31] [18]), self-driving cars ([1] [7] [30] [4]), or surveillance cameras ([9] [23] [41] [39]), etc. The performance of such systems critically depends on a reliable and efficient object tracking algorithm. It is especially important to track an object online and in real-time when the camera is running under challenging situations: illumination, changing pose, motion blurring, partial and full occlusion, etc. These two fundamental features are the core requirements for human-robot interactions (e.g., person-following robots).
视觉目标跟踪是许多应用中的重要组成部分,例如跟随机器人 ([6] [5] [31] [18])、自动驾驶汽车 ([1] [7] [30] [4]) 或监控摄像头 ([9] [23] [41] [39]) 等。这类系统的性能关键依赖于可靠且高效的目标跟踪算法。当相机在具有挑战性的环境下运行时(如光照变化、姿态变化、运动模糊、部分或完全遮挡等),在线实时跟踪目标尤为重要。这两项基本特性是人机交互(例如跟随机器人)的核心需求。
To address the visual object tracking problems, many benchmarks have been developed, such as Object Tracking Benchmark (OTB50 [36] and OTB100 [37]), and Visual Object Tracking Challenges (VOT2016 [21], VOT2018 [19], VOT2019 [20]). In OTB datasets, ground truth was labeled by axis aligned bounding boxes and while in VOT datasets rotated bounding boxes were used. Comparing between axis-aligned bounding boxes and rotated bounding boxes, rotated bounding boxes contain a minimal amount of background pixels [21]. Thus, the datasets with rotated bounding boxes have the tighter enclosed boxes than the axis-aligned bounding boxes. As well as, the rotated bounding boxes provide the object orientation in the image plane. The orientation information can be further used to solve many computer vision problems (e.g., action classification).
为解决视觉目标跟踪问题,已开发出多种基准数据集,例如目标跟踪基准(OTB50 [36] 和 OTB100 [37])以及视觉目标跟踪挑战赛(VOT2016 [21]、VOT2018 [19]、VOT2019 [20])。在OTB数据集中,真实标注采用轴对齐边界框,而VOT数据集则使用旋转边界框。相较于轴对齐边界框,旋转边界框能包含更少的背景像素[21]。因此,采用旋转边界框的数据集能提供比轴对齐边界框更紧密的包围框。此外,旋转边界框还能提供目标在图像平面中的方向信息,这些方向信息可进一步用于解决诸多计算机视觉问题(例如行为分类)。
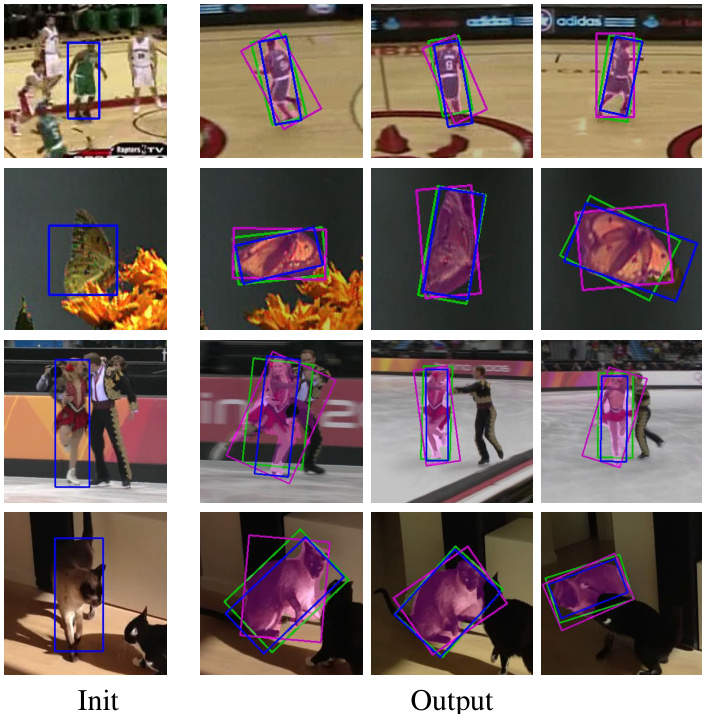
Figure 1. Our approach SiamMask E yields lager IoU between the ground truth (blue) and its prediction (green) than the original SiamMask (magenta). SiamMask E predicts a higher accuracy on the orientation of the bounding boxes which improves the average overlap accuracy (A) and expected average overlap (EAO).
图 1: 我们的方法 SiamMask E 在真实标注 (蓝色) 和预测结果 (绿色) 之间获得了比原始 SiamMask (洋红色) 更大的交并比 (IoU)。SiamMask E 对边界框方向的预测更准确,从而提升了平均重叠精度 (A) 和期望平均重叠 (EAO)。
Despite the advantage of rotated bounding boxes, it is very computationally intensive to estimate the rotation angle and scale of the bounding boxes. Many researchers have developed novel algorithms to settle the problem. But most of them have limitations in terms of tracking speed or accuracy [17], [33]. In the meantime, fully convolutional Siamese networks [2] had become popular in the field of object tracking. However, the original Siamese networks did not solve the rotation problem. Wang et al. (SiamMask) [35] have been inspired by the advanced version of Siamese network (SiamRPN [25], $\mathrm{SiamRPN{+}}+\mathrm{\Lambda}$ 24]) and wide range of image datasets (Youtube-VOS [38], COCO [26], ImageNet [34], etc.). SiamMask is able to predict a segmentation mask on the target for tracking and fits a minimum area rotated bounding box in real-time (87 fps).
尽管旋转边界框具有优势,但估算其旋转角度和尺度需要极高的计算量。许多研究者开发了新算法来解决这一问题,但大多数方案在跟踪速度或精度上存在局限 [17], [33]。与此同时,全卷积孪生网络 [2] 在目标跟踪领域逐渐流行,但原始孪生网络未能解决旋转问题。Wang 等人 (SiamMask) [35] 受到孪生网络进阶版本 (SiamRPN [25], $\mathrm{SiamRPN{+}}+\mathrm{\Lambda}$ 24]) 和多样化图像数据集 (Youtube-VOS [38], COCO [26], ImageNet [34] 等) 的启发,实现了对目标分割掩模的实时预测 (87 帧/秒),并拟合最小面积的旋转边界框。
In this paper, we propose a novel efficient rotated bounding box estimation algorithm when a segmentation/mask of an object is given. Particularly, the masks are generated by SiamMask. The key problem is to predict the rotation angle of the bounding boxes. Inspired by the conic fitting problem described by Fitzgibbon et al. [8], we try to fit an ellipse on the mask to compute the rotation angle. Once the rotation angle is known, then we could fit a rotated rectangle on the mask. Our algorithm consists of two parts: (1) rotation angle estimation, and (2) scale calculation. Details will be provided in Section 3.
本文提出了一种新颖高效的旋转边界框估计算法,用于在给定物体分割/掩码时进行预测。特别地,这些掩码由SiamMask生成。关键问题在于预测边界框的旋转角度。受Fitzgibbon等人[8]描述的圆锥曲线拟合问题启发,我们尝试在掩码上拟合椭圆来计算旋转角度。一旦确定旋转角度,便可在掩码上拟合旋转矩形。该算法包含两部分:(1) 旋转角度估计,(2) 尺度计算。具体细节将在第3节阐述。
The contribution of this paper can be summarized in the following three aspects:
本文的贡献可总结为以下三个方面:
The paper is structured as follows. The most relevant work will be briefly summarized in Section 2. Then, we will describe our approach in detail in Section 3. The evaluation of the algorithm is in Section 4. Finally, Section 5 concludes the paper and discusses future work.
本文结构如下。第2节简要概述了最相关的工作。接着,第3节详细描述了我们的方法。算法的评估在第4节进行。最后,第5节总结了本文并讨论了未来的工作。
2. Related Work
2. 相关工作
In this section, we discuss the history of the Siamese network based tracking algorithms and several trackers that
在本节中,我们讨论基于Siamese网络的跟踪算法历史以及几种跟踪器
yield rotated bounding boxes.
生成旋转边界框。
2.1. Siamese network based trackers
2.1. 基于孪生网络 (Siamese network) 的跟踪器
The first Siamese network based object tracking algorithm (SiamFC) was introduced by Bertinetto et al. [2] in 2016. The Siamese network is trained offline on a dataset for object detection in videos. The input to the network are two images, one is an exemplar image $z$ , the other one is the search image $x$ . Then, a dense response map is generated from the output of the network. SiamFC learns and predicts the similarity between the regions in $x$ and the exemplar image $z$ . In order to handle the object scale variantion, SiamFC searches for objects at five scales $1.025^{{2,1,0,1,2}}$ near the target’s previous location. As a result, there will be 5 forward passes on each frame. SiamFC runs at about 58 fps, which is the fastest fully convolutional network (CNN) based tracker comparing to online training and updating networks in 2016. However, SiamFC is an axis-aligned bounding box tracker. It couldn’t outperform the online training and updating deep CNN tracker MDNet [27] (1 fps) in terms of average overlap accuracy.
首个基于孪生网络的目标跟踪算法(SiamFC)由Bertinetto等人[2]于2016年提出。该孪生网络通过视频目标检测数据集进行离线训练,网络输入包含两个图像:一个是模板图像$z$,另一个是搜索图像$x$。网络输出会生成密集响应图,SiamFC通过学习和预测$x$中区域与模板图像$z$之间的相似度来实现跟踪。为处理目标尺度变化,SiamFC在目标前一位置附近采用5种尺度$1.025^{{2,1,0,1,2}}$进行搜索,因此每帧需要进行5次前向传播。SiamFC运行速度约为58 fps,是2016年基于全卷积网络(CNN)且无需在线训练更新的最快跟踪器。但作为轴对齐边界框跟踪器,其平均重叠精度仍不及需要在线训练更新的深度CNN跟踪器MDNet[27](1 fps)。
He et al. [14] combines two branches (Semantic net and Appearance net) of Siamese network (SA-Siam) to improve the generalization capability of SiamFC. Two branches are individually trained, and then the two branches are combined to output the similarity score at testing. S-Net is an AlexNet [22] pretrained on an image classification dataset. A-Net is a SiamFC pretrained on an object detection from video dataset. S-Net improves the discrimination power of the SA-Siam tracker because different objects activate different sets of feature channels in the Semantic branch. Due to the complexity of the two branches, SA-Siam runs at 50 fps when tracking with pretrained model.
He等人[14]将孪生网络(SA-Siam)的两个分支(语义网络和外观网络)相结合,以提升SiamFC的泛化能力。两个分支分别训练,在测试时合并输出相似度得分。S-Net是基于图像分类数据集预训练的AlexNet[22],A-Net是基于视频目标检测数据集预训练的SiamFC。由于不同物体会激活语义分支中不同的特征通道组合,S-Net增强了SA-Siam跟踪器的判别能力。受双分支结构复杂度影响,SA-Siam在使用预训练模型时跟踪速度为50帧/秒。
By modifying the original Siamese net with a Region Proposal Network(RPN) [32], Li et al. [25] proposed a Siamese Region Proposal Network (SiamRPN) to estimate the target location with the variable bounding boxes. The output of SiamRPN contains a set of anchor boxes with corresponding scores. So, the bounding box with the best score is considered as the target location. The benefit of RPN is to reduce the multi-scale testing complexity in the traditional Siamese networks (SiamFC, SA-Siam). An updated version SiamRPN $^{++}$ [24] has released in 2019. In terms of processing speed, SiamRPN is 160 fps and SiamRPN $^{++}$ is about 35 fps.
通过将原始孪生网络改造为区域提议网络(RPN) [32],Li等人[25]提出了一种孪生区域提议网络(SiamRPN),用于通过可变边界框估计目标位置。SiamRPN的输出包含一组带有相应得分的锚框,因此得分最高的边界框被视为目标位置。RPN的优势在于降低了传统孪生网络(SiamFC、SA-Siam)中多尺度测试的复杂度。2019年发布了升级版SiamRPN$^{++}$[24]。在处理速度方面,SiamRPN为160 fps,SiamRPN$^{++}$约为35 fps。
Unlike SiamFC, SA-Siam, and SiamRPN yielding axis-aligned bounding boxes, SiamMask [35] uses the advantage from a video object segmentation dataset and trained a Siamese net to predict a set of masks and bounding boxes on the target. The bounding boxes are estimated based on the masks using rotated minimum bounding rectangle (MBR) at the speed of 87 fps. However, the MBR does not always predict the bounding boxes that perfectly align with the ground truth bounding boxes (see Figure 1). Although the same bounding boxes prediction algorithm used in VOT2016 for generating the ground truth can improve the average overlap accuracy dramatically, the running speed decreases to 5 fps. To address this problem, we present a new method in Section 3 that can process frames in real-time and achieves a better result.
与生成轴对齐边界框的SiamFC、SA-Siam和SiamRPN不同,SiamMask [35] 利用了视频对象分割数据集的优势,训练了一个孪生网络来预测目标上的一组掩码和边界框。这些边界框是基于掩码通过旋转最小外接矩形 (MBR) 以87帧/秒的速度估算得出的。然而,MBR并不总能预测出与真实边界框完美对齐的边界框 (见图 1)。尽管采用VOT2016中用于生成真实值的相同边界框预测算法可以显著提高平均重叠精度,但运行速度会降至5帧/秒。为了解决这个问题,我们在第3节提出了一种新方法,能够实时处理帧并取得更好的结果。
2.2. Rotated bounding boxes
2.2. 旋转边界框
Beside the Siamese network trackers, Nebehay et al. [28] (CMT) use a key-point matching approach to scale and rotate the bounding boxes. But, this tracker cannot handle deformable objects. [29] is an update of CMT, and the processing speed dropped to 11 fps.
除了连体网络跟踪器外,Nebehay等人[28] (CMT)采用关键点匹配方法来缩放和旋转边界框。但该跟踪器无法处理可变形物体。[29]是CMT的更新版本,其处理速度降至11帧/秒。
Hua et al. [17] suggest a proposal selection method (optical flow [3] and Hough transform [16]) to filter out a group of locations and orientations that very likely contains the object. Then, they use three cues (detection confidence, objectness measures from object edges and motion boundaries) to determine which location has the highest likelihood. But, this approach also couldn’t run in real-time (0.3 fps).
Hua等人[17]提出了一种提案选择方法(光流[3]和霍夫变换[16]),用于筛选出极可能包含目标的位置和方向组。随后,他们利用三个线索(检测置信度、来自物体边缘和目标性测量的运动边界)来确定哪个位置具有最高可能性。但该方法同样无法实时运行(0.3帧/秒)。
Zhang et al. [40] propose a rotation estimation method using Log-Polar transformation. In Log-Polar coordinate, a set of 36 rotation sample are chosen on every $\begin{array}{r}{\Delta=\frac{2\pi}{R}}\end{array}$ , where $R=36$ . But, the rotation sample set also increases the rum-time of KCF [15] tracker by 36 times.
张等人 [40] 提出了一种利用对数极坐标变换 (Log-Polar transformation) 的旋转估计方法。在对数极坐标系中,每间隔 $\begin{array}{r}{\Delta=\frac{2\pi}{R}}\end{array}$ (其中 $R=36$) 选取36个旋转样本。然而,这种旋转样本集也会使KCF [15] 跟踪器的运行时间增加36倍。
Guo et al. [11] build a structure-regularized compressive tracking (SCT) with online update. During the detection stage, SCT samples several candidates with different rotation angles based on integral image and quadtree segmentation. SCT runs on a computer system without GPU at 15 fps.
Guo等人 [11] 提出了一种具有在线更新功能的结构正则化压缩跟踪(SCT)方法。在检测阶段,SCT基于积分图像和四叉树分割技术,对不同旋转角度的多个候选样本进行采样。该系统可在无GPU的计算机上以15帧/秒的速度运行。
Recently, a rotation adaptive tracking approach was introduced by Rout et al. [33]. The authors assume that the rotation angle is limited within a range (e.g., $\pm10^{\circ}$ ). However, this assumption doesn’t always hold. He et al. [13] built on top of SA-Siam [14] with angle estimation strategy. Although the method could reduce the processing time, it still limits the rotation angle to some degrees (e.g., $-\pi/8$ , $\pi/8,$ . In order to find an arbitrary rotation angle, we present our approach in the next section.
最近,Rout等人[33]提出了一种旋转自适应跟踪方法。作者假设旋转角度限制在一定范围内(例如 $\pm10^{\circ}$)。然而,这一假设并不总是成立。He等人[13]在SA-Siam[14]基础上增加了角度估计策略。尽管该方法能减少处理时间,但仍将旋转角度限制在特定范围内(例如 $-\pi/8$,$\pi/8$)。为寻找任意旋转角度的解决方案,我们将在下一节介绍本方法。
3. Approach
3. 方法
In the original SiamMask [35] tracker, Wang et al. compared three different bounding boxes estimation algorithms: min-max axis-aligned rectangle (Min-max), minimum area rectangle (MBR), and optimal bounding box [21] $(O p t)$ . Due to the computational burden, Opt could not perform in real-time (5fps). SiamMask with MBR is the real-time (87 fps) state-of-the-art tracker in terms of average overlap Accuracy. Although MBR performs better than the other bounding box estimation algorithms, it has a weakness such that minimum area rectangle could not represent the geometric shape and point distribution of the masks (see Figure 2). As a result, most of the estimated bounding boxes are not in the correct orientation. In the following subsections, we will discuss an alternate solution to generate bounding boxes with correct rotation angle and tighter size by post-processing on the output mask from SiamMask. Our method consists of the steps in Figure 3.
在原版SiamMask [35]跟踪器中,Wang等人比较了三种不同的边界框估计算法:最小-最大轴对齐矩形 (Min-max)、最小面积矩形 (MBR) 和最优边界框 [21] $(Opt)$。由于计算负担,Opt无法实时运行(5fps)。采用MBR的SiamMask在平均重叠精度指标下是实时(87 fps)的顶尖跟踪器。尽管MBR表现优于其他边界框估计算法,但它存在一个缺陷:最小面积矩形无法准确表征掩模的几何形状和点分布(见图2)。因此,大多数估计的边界框方向都不正确。在后续小节中,我们将讨论通过对SiamMask输出掩模进行后处理来生成具有正确旋转角度和更紧凑尺寸的边界框的替代方案。我们的方法包含图3所示的步骤。
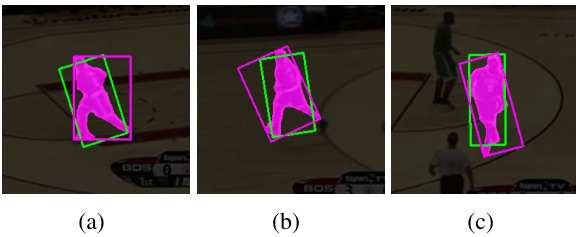
Figure 2. This figure shows some examples of minimum area rectangle (magenta); this does not determine bounding boxes according to the geometric shape and point distribution of the segmentation/mask. Thus, the rotation angles are not as accurate as our approach (green)
图 2: 该图展示了一些最小面积矩形(洋红色)的示例;这种方法无法根据分割/掩码的几何形状和点分布确定边界框。因此,其旋转角度不如我们的方法(绿色)准确
3.1. Rotation angle estimation
3.1. 旋转角度估计
To estimate the rotation angle, we adopted the fitEllipse API provided by OpenCV3 4 which use a least-squares scheme [10] to solved the ellipse fitting problem. An improved version was described in [12]. This algorithm (B2AC) Algebraic distance with quadratic constraint was first introduced by Fitzgibbon et al. [8].
为了估算旋转角度,我们采用了OpenCV3 4提供的fitEllipse API,该接口使用最小二乘法 [10] 解决椭圆拟合问题。[12] 中描述了改进版本。此算法 (B2AC) 由Fitzgibbon等人 [8] 首次提出,全称为二次约束代数距离法。
An ellipse can be formulated using a conic equation with a constraint:
椭圆可以通过带约束的二次曲线方程来表示:
$$
{\begin{array}{r}{F(x,y)=a x^{2}+b x y+c y^{2}+d x+e y+f=0}\ {{\mathrm{where}},b^{2}-4a c<0}\end{array}}
$$
$$
{\begin{array}{r}{F(x,y)=a x^{2}+b x y+c y^{2}+d x+e y+f=0}\ {{\mathrm{where}},b^{2}-4a c<0}\end{array}}
$$
In Equation 1, $a,b,c,d,e,f$ are the coefficients of the ellipse and $x,y$ are the points on the ellipse. By grouping the coefficients into a vector, we have the following two vectors:
在公式1中,$a,b,c,d,e,f$是椭圆的系数,$x,y$是椭圆上的点。通过将系数分组为向量,我们得到以下两个向量:
$$
\begin{array}{l}{\mathbf{a}=[a,b,c,d,e,f]^{T}}\ {\mathbf{x}=[x^{2},x y,y^{2},x,y,1]}\end{array}
$$
$$
\begin{array}{l}{\mathbf{a}=[a,b,c,d,e,f]^{T}}\ {\mathbf{x}=[x^{2},x y,y^{2},x,y,1]}\end{array}
$$
So, the conic can be written as:
因此,该圆锥曲线可表示为:
$$
F(\mathbf{x})=\mathbf{x}\cdot\mathbf{a}=0
$$
$$
F(\mathbf{x})=\mathbf{x}\cdot\mathbf{a}=0
$$
To fit an ellipse on a set of points $\begin{array}{r l}{A}&{{}=}\end{array}$ ${(x_{1},y_{1}),...,(x_{N},y_{N})},w h e r e|A|=N$ , we need to find the coefficient vector a. Halir et al. [12] introduced an improved least squares method to minimize the sum of squared error of the following equation:
在一组点 $\begin{array}{r l}{A}&{{}=}\end{array}$ ${(x_{1},y_{1}),...,(x_{N},y_{N})}, 其中|A|=N$ 上拟合椭圆时,需要找到系数向量 a。Halir 等人 [12] 提出了一种改进的最小二乘法,用于最小化以下方程的平方误差和:

Figure 3. Our algorithm includes seven steps: (a) take a target mask as input. (b) apply an ellipse fitting algorithm [8] on edge of the mask (Here, we have the points on the edge as a set $A$ in Equation 4), then determine the center of the ellipse and the rotation angle. (c) compute the affine transformation matrix using the rotation angle and the center from the ellipse, then apply the transformation on the ellipse center. (d) apply a rectangular rotated bounding box (green) on the ellipse. (e) draw a min-max axis-aligned bounding box (blue) on the transformed mask. (f) calculate the intersection of the blue box and green box to form a new bounding box (red). (g) calculate the inverse of the affine transformation matrix, then apply transformation to convert back to the original image coordinate, and output the red box.
图 3: 我们的算法包含七个步骤:(a) 以目标掩码作为输入。(b) 在掩码边缘应用椭圆拟合算法 [8] (此处我们将边缘点集记为公式4中的集合 $A$),随后确定椭圆中心及旋转角度。(c) 利用椭圆旋转角度和中心计算仿射变换矩阵,并对椭圆中心应用该变换。(d) 在椭圆上应用旋转矩形边界框 (绿色)。(e) 在变换后的掩码上绘制最小-最大轴对齐边界框 (蓝色)。(f) 计算蓝色框与绿色框的交集以形成新边界框 (红色)。(g) 计算仿射变换矩阵的逆矩阵,应用逆变换转换回原始图像坐标系,最终输出红色框。
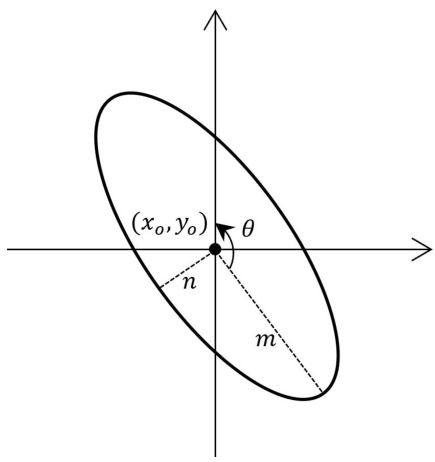
Figure 4. Ellipse notations
图 4: 椭圆标注
$$
\operatorname*{min}{\mathbf{a}}\sum{i=1}^{N}F(x_{i},y_{i})^{2}=\operatorname*{min}_{\mathbf{a}}\sum_{i=1}^{N}F(\mathbf{x}_{i})^{2}
$$
$$
\operatorname*{min}{\mathbf{a}}\sum{i=1}^{N}F(x_{i},y_{i})^{2}=\operatorname*{min}_{\mathbf{a}}\sum_{i=1}^{N}F(\mathbf{x}_{i})^{2}
$$
where, $\mathbf{x}{i}=[x{i}^{2},x_{i}y_{i},y_{i}^{2},x_{i},y_{i},1]$ , and $A_{i}=\left(x_{i},y_{i}\right)$
其中,$\mathbf{x}{i}=[x{i}^{2},x_{i}y_{i},y_{i}^{2},x_{i},y_{i},1]$,且$A_{i}=\left(x_{i},y_{i}\right)$
Let us denote the following terms for the fitted ellipse (also see Figure 4):
我们用以下术语表示拟合的椭圆(另见图 4):
$m$ semi-major axis $n$ semi-minor axis $(x_{o},y_{o})$ center coordinate of the ellipse $\theta$ rotation angle
$m$ 半长轴
$n$ 半短轴
$(x_{o},y_{o})$ 椭圆中心坐标
$\theta$ 旋转角度
Be aware that, when the ellipse is near-circular (rotational symmetric shapes), $\theta$ is not stable. A solution for this case is to force $\theta=90^{o}$ . However, it did not increase the performance of the VOT datasets empirically.
请注意,当椭圆接近圆形(旋转对称形状)时,$\theta$ 不稳定。针对这种情况的解决方案是强制设定 $\theta=90^{o}$,但经验证这并未提升VOT数据集的性能。
3.2. SiamMask E
3.2. SiamMask E
Since we need to rotate the image with respect to the ellipse center, an affine transformation (Translation and Rotation for our case) will be used here to compute the transformed coordinates. After the estimation of rotation angle $\theta$ and the center point $(x_{o},y_{o})$ , then we need to compute the 2D affine transformation matrix $M$ :
由于我们需要以椭圆中心为基准旋转图像,这里将使用仿射变换(本例中为平移和旋转)来计算变换后的坐标。在估计出旋转角度 $\theta$ 和中心点 $(x_{o},y_{o})$ 后,需要计算二维仿射变换矩阵 $M$:
$$
M=\left[\begin{array}{l l l}{{c o s\Theta}}&{{s i n\Theta}}&{{(1-c o s\Theta)x_{o}-s i n\Theta y_{o}}}\ {{-s i n\Theta}}&{{c o s\Theta}}&{{s i n\Theta x_{o}-(1-c o s\Theta)y_{o}}}\end{array}\right]
$$
$$
M=\left[\begin{array}{l l l}{{c o s\Theta}}&{{s i n\Theta}}&{{(1-c o s\Theta)x_{o}-s i n\Theta y_{o}}}\ {{-s i n\Theta}}&{{c o s\Theta}}&{{s i n\Theta x_{o}-(1-c o s\Theta)y_{o}}}\end{array}\right]
$$
Once the affine transformation matrix is computed, then we apply the rotation on the segmentation/mask about the ellipse’s center $(x_{o},y_{o})$ : Let’s denote the mask as a set of points Mask (magenta color in Figure 3(a)), and the transformed mask as $M a s k^{\prime}$ (magenta color in Figure 3(d)).
一旦计算出仿射变换矩阵,我们就在分割/掩模上以椭圆中心 $(x_{o},y_{o})$ 为旋转中心进行旋转:将掩模表示为一组点集 Mask (图 3(a) 中的洋红色部分),变换后的掩模记为 $M a s k^{\prime}$ (图 3(d) 中的洋红色部分)。
$$
M a s k^{\prime}=M*\left[\begin{array}{l}{{x}}\ {{y}}\ {{1}}\end{array}\right]\forall(x,y)\in M a s k
$$
$$
M a s k^{\prime}=M*\left[\begin{array}{l}{{x}}\ {{y}}\ {{1}}\end{array}\right]\forall(x,y)\in M a s k
$$
After this step, our aim is to output the intersection (red in Figure 3(f)) between the min-max axis-aligned bounding box (blue in Figure 3(e)) and the ellipse bounding box (green in Figure 3(e)). The advantage of using the ellipse bounding box is to cut out the unexpected portion of the shape (e.g., protruding limbs). Thus, the output bounding box would be able to focus on the trunk of the human body. After the affine transformation, the ellipse bounding box is trivial, and we denote it as $G$ :
在这一步骤之后,我们的目标是输出最小-最大轴对齐边界框 (图 3(e) 中的蓝色部分) 与椭圆边界框 (图 3(e) 中的绿色部分) 的交集 (图 3(f) 中的红色部分)。使用椭圆边界框的优势在于能够剔除形状中不预期的部分 (例如突出的肢体)。因此,输出的边界框能够聚焦于人体的躯干部分。经过仿射变换后,椭圆边界框的处理变得简单,我们将其表示为 $G$:
$$
G=[x_{o}-n,y_{o}-m,x_{o}+n,y_{o}+m]
$$
$$
G=[x_{o}-n,y_{o}-m,x_{o}+n,y_{o}+m]
$$
The min-max axis-aligned bounding box denote as $B$ :
最小轴对齐包围盒记为 $B$:
$$
\begin{array}{r}{B=[m i n(\forall x\in M a s k^{\prime}),m i n(\forall y\in M a s k^{\prime}),}\ {m a x(\forall x\in M a s k^{\prime}),m a x(\forall y\in M a s k^{\prime})]}\end{array}
$$
$$
\begin{array}{r}{B=[min(\forall x\in Mask^{\prime}),min(\forall y\in Mask^{\prime}),}\ {max(\forall x\in Mask^{\prime}),max(\forall y\in Mask^{\prime})]}\end{array}
$$

Figure 5. Refinement step: (a) move four edges toward the bounding box center if the constraint in Subsection 3.3 is not satisfied. (b) the magenta box is the estimated bounding box from SiamMask E, and the green box is a sample output after the refinement step. Blue box is the ground truth.
图 5: 优化步骤:(a) 当子章节3.3的约束条件不满足时,将四条边向边界框中心移动。(b) 洋红色框是SiamMask E估计的边界框,绿色框是优化步骤后的示例输出。蓝色框是真实标注框。
The intersection bounding box $R$ (red in Figure 3(f)) can be calculated using the following equation:
图 3(f) 中的交集边界框 $R$ (红色) 可通过以下公式计算:
$$
\begin{array}{r}{R=[m a x(G_{1},B_{1}),m a x(G_{2},B_{2}),}\ {m i n(G_{3},B_{3}),m i n(G_{4},B_{4})]}\end{array}
$$
$$
\begin{array}{r}{R=[m a x(G_{1},B_{1}),m a x(G_{2},B_{2}),}\ {m i n(G_{3},B_{3}),m i n(G_{4},B_{4})]}\end{array}
$$
then, convert $R$ to a polygon
然后将 $R$ 转换为多边形
$$
R=[[R_{1},R_{2}],[R_{3},R_{2}],[R_{3},R_{4}],[R_{1},R_{4}]]
$$
$$
R=[[R_{1},R_{2}],[R_{3},R_{2}],[R_{3},R_{4}],[R_{1},R_{4}]]
$$
The last step is to convert the transformed coordinate back to the image coordinate using the inverse of the affine transformation matrix $M$ . We denote the output bounding box as $R^{\prime}$ (red color in Figure $3(\mathrm{g}),$ ):
最后一步是使用仿射变换矩阵 $M$ 的逆矩阵将变换后的坐标转换回图像坐标系。我们将输出边界框表示为 $R^{\prime}$ (图 $3(\mathrm{g})$ 中的红色部分):
$$
R^{\prime}=M^{-1}*\left[\begin{array}{l}{{x}}\ {{y}}\ {{1}}\end{array}\right];\forall(x,y)\in R
$$
$$
R^{\prime}=M^{-1}*\left[\begin{array}{l}{{x}}\ {{y}}\ {{1}}\end{array}\right];\forall(x,y)\in R
$$
3.3. Refinement step (Ref)
3.3. 优化步骤 (Ref)
As you can see from Figure 1 at row 3 column 2, our bounding box (green) is not as tight as the ground truth (blue). This problem because the Mask generated by SiamMask includes the limbs of the dancer. To manage this problem, we implement a refinement procedure to slim the size of the bounding box by evaluating the amount of Mask that an edge is crossing. Let’s denote the length of an edge as $\alpha$ , and the portion of the edge intersecting the Mask is $\beta$ . We set a constraint such that, $\beta>\alpha$ factor; otherwise, the edge will gradually move toward the bounding box center (see Figure 5). Here, we choose factor $=0.258$ empirically on dataset VOT2018.
从图1第3行第2列可以看出,我们的边界框(绿色)不如真实标注(蓝色)紧凑。这个问题源于SiamMask生成的Mask包含了舞者的肢体部分。为解决该问题,我们通过评估边缘与Mask的交叉面积实现边界框精细化收缩。设边缘长度为$\alpha$,与Mask相交部分为$\beta$。我们设定约束条件$\beta>\alpha$的系数,否则边缘会逐步向边界框中心移动(见图5)。在VOT2018数据集上,我们经验性地选择系数$=0.258$。
4. Experiments
4. 实验
In this section, we evaluate our proposed methods on the datasets that labeled with rotated bounding boxes: VOT2016, VOT2018, and VOT2019.
在本节中,我们在标注有旋转边界框的数据集 VOT2016、VOT2018 和 VOT2019 上评估所提出的方法。
4.1. Environment setup
4.1. 环境设置
In order to provide a fair comparison, we test our algorithm using the same pretrained Siamese network model and the same parameters in [35]. The reported data is evaluated on a desktop computer with the following hardware:
为了进行公平比较,我们使用与[35]相同的预训练孪生网络模型和相同参数测试算法。报告数据在配备以下硬件的台式电脑上进行评估:
4.2. Evaluation metrics
4.2. 评估指标
We only evaluation on the VOT challenge series (VOT2015-2019 short term), where VOT2015 has the same data sequences as VOT2016, and VOT2017 has the same sequences as VOT2018. These three datasets contain 60 sequences with different challenging situations (e.g., motion blur, size change, occlusion, illumination change, etc). To the best of our knowledge, VOT2015-2019 are the only object tracking datasets that labeled with rotated bounding boxes. We also adopt the supervised tracking evaluation methods that are used in VOT2016 [21]: Accuracy (A), Robustness (R), and Expected Average Overlap (EAO). The Accuracy is the average overlap between the estimated and the ground truth bounding boxes when the target is successfully being tracked. The Robustness measures the ratio between the number of times the tracker loses the target (fails) and the number of resumed trackings. The Expected Average Overlap (EAO) is considered as the primary measurement in the VOT challenge. According to the official toolkit, the tracker will be reinitialized when the estimated bounding box has no intersection with the ground truth. After five frames, the tracker will restart with the ground truth bounding box.
我们仅在VOT挑战系列(VOT2015-2019短期任务)上进行评估,其中VOT2015与VOT2016使用相同的数据序列,VOT2017与VOT2018序列相同。这三个数据集包含60个具有不同挑战场景的序列(如运动模糊、尺寸变化、遮挡、光照变化等)。据我们所知,VOT2015-2019是唯一标注了旋转边界框的目标跟踪数据集。我们同样采用VOT2016[21]中使用的监督式跟踪评估方法:准确度(A)、鲁棒性(R)和期望平均重叠率(EAO)。准确度是指目标被成功跟踪时,预测边界框与真实边界框之间的平均重叠率。鲁棒性衡量跟踪器丢失目标(失败)次数与恢复跟踪次数的比率。期望平均重叠率(EAO)被视为VOT挑战的主要评价指标。根据官方工具包规定,当预测边界框与真实边界框无交集时,跟踪器将重新初始化。五帧之后,跟踪器会以真实边界框重新启动。
4.3. Overall results
4.3. 总体结果
Table 1 presents the result comparison between the state-of-the-art Siamese based tracking algorithms on VOT2016, VOT2018, and VOT2019 datasets. Our tracker SiamMask E with Ref has the 0.655 Accuracy and 0.446 EAO on VOT2018 dataset which it a new state-of-the-art comparing the other Siamese trackers and the VOT2018 short term challenge winners [19]. Although SiamMaskOpt has the similar performance as ours, due to the computation complexity, SiamMask-Opt can only run at 5 frames per second. However, our tracker is able to process in realtime with the speed of more than 80 frames per second. Similarly, our tracker also forms a new state-of-the-art result on VOT2019.
表 1 展示了基于孪生网络的最先进跟踪算法在 VOT2016、VOT2018 和 VOT2019 数据集上的结果对比。我们的跟踪器 SiamMask E with Ref 在 VOT2018 数据集上取得了 0.655 的准确率和 0.446 的 EAO (Expected Average Overlap) 值,相比其他孪生跟踪器和 VOT2018 短期挑战赛冠军 [19] 创下了新的最优成绩。尽管 SiamMaskOpt 的性能与我们相近,但由于计算复杂度高,SiamMask-Opt 只能以每秒 5 帧的速度运行。而我们的跟踪器能以超过每秒 80 帧的速度实时处理。同样地,我们的跟踪器在 VOT2019 上也创造了新的最优结果。
4.4. Ablation studies
4.4. 消融实验
The ablation test results are shown in Table 2. In the table, SiamMask E is our baseline model without the refinement step. We exchange the bounding box orientation between SiamMask E and SiamMask, where SiamMask E with Minimum Area Bounding Box angle (SiamMask E $^+$ minA Box Angle) performs weaker than our baseline SiamMask E. Similarly, SiamMask with ellipse angle (SiamMask $^+$ ellipse Angle) is preferable over the original SiamMask. By adding the refinement step (Ref) to both SiamMask and SiamMask E, the average overlap Accuracy increase dramatically. Furthermore, we modify the bounding box rotation of SiamMask E $^+$ Ref with the original Minimum Area Bounding Box angle ( SiamMask E $^+$ Ref $^+$ minA Box Angle) which results in slightly decreasing on the primary measurement EAO. It proves that using the ellipse’s angle could improve the tracking performance on the VOT datasets. On the other hand, we also test SiamMask $^+$ Ref with changing the angle of the Minimum Area Bounding Box to the ellipse’s angle (SiamMask $^+$ ellipse Angle $+~\mathrm{Ref})$ . The result shows that SiamMask $^+$ ellipse Angle $^+$ Ref also has some degree of improvement on both VOT2018 and VOT2019 on the primary measurement EAO. Overall, SiamMask E, which improves the bounding box orientation and scale using ellipse fitting on top of SiamMask, has a similar performance as the original SimaMask with the refinement step (SiamMask $^+$ Ref). And, SiamMask E with the refinement step (SiamMask $\mathrm{E}+\mathrm{Ref})$
消融实验结果如表 2 所示。表中 SiamMask E 是不带优化步骤的基线模型。我们交换了 SiamMask E 和 SiamMask 的边界框方向,其中采用最小面积边界框角度 (SiamMask E $^+$ minA Box Angle) 的 SiamMask E 表现弱于基线 SiamMask E。类似地,采用椭圆角度 (SiamMask $^+$ ellipse Angle) 的 SiamMask 优于原始 SiamMask。通过为 SiamMask 和 SiamMask E 添加优化步骤 (Ref),平均重叠精度显著提升。此外,我们用原始最小面积边界框角度 (SiamMask E $^+$ Ref $^+$ minA Box Angle) 修改 SiamMask E $^+$ Ref 的边界框旋转,导致主要指标 EAO 轻微下降。这证明使用椭圆角度可以提升 VOT 数据集上的跟踪性能。另一方面,我们还测试了将最小面积边界框角度改为椭圆角度 (SiamMask $^+$ ellipse Angle $+~\mathrm{Ref})$ 的 SiamMask $^+$ Ref。结果表明,SiamMask $^+$ ellipse Angle $^+$ Ref 在 VOT2018 和 VOT2019 的主要指标 EAO 上也有一定提升。总体而言,在 SiamMask 基础上通过椭圆拟合改进边界框方向和尺度的 SiamMask E,其性能与带优化步骤的原始 SiamMask (SiamMask $^+$ Ref) 相当。而带优化步骤的 SiamMask E (SiamMask $\mathrm{E}+\mathrm{Ref})$
Table 1. Comparing with the state-of-the-art Siamese trackers on VOT2019, VOT2018, and VOT2016. Our tracker SiamMask E with Ref outperforms other trackers in terms of average overlap accuracy (A) and expected average overlap (EAO). $\uparrow$ stands for the higher the best, and $\downarrow$ stands for the lower the best. * the numbers are reported in the original paper.
表 1: 在VOT2019、VOT2018和VOT2016上与最先进的孪生跟踪器对比。我们的跟踪器SiamMask E with Ref在平均重叠精度(A)和期望平均重叠(EAO)方面优于其他跟踪器。$\uparrow$ 表示越高越好,$\downarrow$ 表示越低越好。* 数字来源于原论文。
| | VOT2019 | | | VOT2018 | | | VOT2016 | | | 速度↑ |
| | A↑ | R↓ | EAO↑ | A↑ | R↓ | EAO↑ | A↑ | R↓ | EAO↑ | |
| SiamRPN++ SiamMask | 0.595 0.596 | 0.467 0.467 | 0.287 0.283 | 0.601 0.598 | 0.234 0.248 | 0.415 0.406 | 0.642 0.621 | 0.196 0.214 | 0.464 0.436 | 46 fps 87 fps |
| SiamMask-Opt* SiamMask_E (Ours) | 0.625 | - 0.482 | 0.298 | 0.642 0.627 | 0.295 0.248 | 0.387 0.427 | 0.670 0.645 | 0.233 0.210 | 0.442 0.452 | 5 fps 85 fps |
| SiamMask_E_Ref (Ours) | 0.652 | 0.487 | 0.309 | 0.655 | 0.253 | 0.446 | 0.677 | 0.224 | 0.466 | 80 fps |
Table 2. Ablation studies: SiamMask E is our baseline tracker with the ellipse angle and ellipse box, and SiamMask is the original tracker with the minimum area bounding box. Ref stands for the refinement step in Subsection 3.3. minA Box Angle stands for the orientation of the minimum area bounding box. ellipse Angle stands for the orientation of the best fitting ellipse. The result shows that the effectiveness of ellipse orientation and refinement step significantly improve the performance of SiamMask.
表 2. 消融研究:SiamMask E 是我们采用椭圆角度和椭圆框的基线跟踪器,SiamMask 是原始采用最小面积边界框的跟踪器。Ref 代表第 3.3 小节中的优化步骤。minA Box Angle 代表最小面积边界框的方向。ellipse Angle 代表最佳拟合椭圆的方向。结果表明椭圆方向和优化步骤显著提升了 SiamMask 的性能。
| VOT2019 | VOT2018 | |||||
|---|---|---|---|---|---|---|
| A↑ | R↓ | EAO↑ | A↑ | R↓ | EAO↑ | |
| SiamMask_E (Ours) SiamMask | 0.625 0.596 | 0.482 0.467 | 0.298 0.283 | 0.627 0.598 | 0.248 0.248 | 0.427 0.406 |
| SiamMask_E+minABoxAngle SiamMask + ellipseAngle | 0.618 0.594 | 0.472 0.477 | 0.292 0.284 | 0.621 0.595 | 0.253 0.243 | 0.418 0.409 |
| SiamMask_E + Ref (Ours) SiamMask+Ref | 0.652 0.644 | 0.487 0.497 | 0.309 0.297 | 0.655 0.645 | 0.253 0.272 | 0.446 |
| SiamMask-E + minABoxAngle + Ref SiamMask + ellipseAngle + Ref | 0.647 0.639 | 0.487 0.502 | 0.302 0.299 | 0.649 0.643 | 0.262 0.267 | 0.416 0.428 0.422 |
outperforms any other combinations on the ablation study table.
消融研究表中表现优于其他任何组合。
4.5. Qualitative results
4.5. 定性结果
To analysis the improvement, we show several results computed on VOT2019 [20] dataset. We compare the stateof-the-art algorithms SiamMask [35] and SiamRPN $^{++}$ [24] along with our approach SiamMask E in Figure 6.
为分析改进效果,我们在VOT2019 [20] 数据集上展示了多项计算结果。图6将当前最优算法SiamMask [35] 和SiamRPN$^{++}$ [24] 与我们的SiamMask E方法进行了对比。
5. Conclusion
5. 结论
In this paper, we updated the SiamMask tracker to achieve the next level of state-of-the-art performance. Our new tracker SiamMask E retains real-time processing speed at 80 fps. We show that the bounding box using ellipse fitting outperforms the minimum area rectangle bounding box in terms of better rotation angle and tighter bounding box scale. Our results show the strength of SiamMask network tracking model such that it can outperform the other state-of-the-art trackers.
本文中,我们升级了SiamMask跟踪器,实现了新一代最先进性能。我们的新型跟踪器SiamMask E保持了80 fps的实时处理速度。研究表明,采用椭圆拟合的边界框在旋转角度和更紧凑的边界框尺度方面均优于最小面积矩形边界框。实验结果证明了SiamMask网络跟踪模型的强大性能,其表现超越了其他最先进的跟踪器。
Future work: Our approach focused on an efficient bounding box refinement algorithm. On a different aspect, if a proper motion model is employed, we believe the result could move to the next level. To attain this, a real-time algorithm is needed to differentiate the camera the target motion in order to estimate the real target motion. As well as, we need to beware the other dynamic distract or s in the scene.
未来工作:我们的方法聚焦于高效的边界框优化算法。另一方面,若采用适当的运动模型,我们相信结果能提升至更高水平。为此,需要实时算法来区分相机与目标的运动,从而估算目标的真实运动。此外,还需警惕场景中其他动态干扰物。

Figure 6. Qualitative results: We show some sample outputs on eight sequences selected from VOT2019 [20], where the red box is SiamMask [35], the cyan box is $\mathrm{SiamRPN{++}}$ [24], the green box is SiamMask E(ours), and the blue box is the ground truth.
图 6: 定性结果:我们展示了从VOT2019 [20]中选取的八个序列上的部分样本输出,其中红色框为SiamMask [35],青色框为$\mathrm{SiamRPN{++}}$ [24],绿色框为SiamMask E(本工作),蓝色框为真实标注。
Acknowledgement
致谢
We acknowledge the financial support of the Natural Sciences and Engineering Research Council of Canada (NSERC), the NSERC Canadian Robotics Network (NCRN), and the Canada Research Chairs Program through grants to John K. Tsotsos. The fist author also would like to thank Dekun Wu provided hardware support for testing.
我们感谢加拿大自然科学与工程研究委员会 (NSERC) 、NSERC加拿大机器人网络 (NCRN) 以及加拿大研究主席计划通过向John K. Tsotsos提供资助给予的财务支持。第一作者还要感谢Dekun Wu为测试提供的硬件支持。
References
参考文献
[1] N. Agarwal, C.-W. Chiang, and A. Sharma. A study on computer vision techniques for self-driving cars. In International Conference on Frontier Computing, pages 629–634.
[1] N. Agarwal, C.-W. Chiang 和 A. Sharma. 自动驾驶汽车计算机视觉技术研究. 见: International Conference on Frontier Computing, 第629-634页.