Geodesic Distance Histogram Feature for Video Segmentation
用于视频分割的测地距离直方图特征
Abstract. This paper proposes a geodesic-distance-based feature that encodes global information for improved video segmentation algorithms. The feature is a joint histogram of intensity and geodesic distances, where the geodesic distances are computed as the shortest paths between superpixels via their boundaries. We also incorporate adaptive voting weights and spatial pyramid configurations to include spatial information into the geodesic histogram feature and show that this further improves results. The feature is generic and can be used as part of various algorithms. In experiments, we test the geodesic histogram feature by incorporating it into two existing video segmentation frameworks. This leads to significantly better performance in 3D video segmentation benchmarks on two datasets.
摘要。本文提出了一种基于测地距离的特征,该特征通过编码全局信息来改进视频分割算法。该特征是强度与测地距离的联合直方图,其中测地距离通过超像素边界之间的最短路径计算得到。我们还引入了自适应投票权重和空间金字塔配置,将空间信息融入测地直方图特征,并证明这能进一步提升效果。该特征具有通用性,可作为多种算法的组成部分。实验中,我们通过将测地直方图特征集成到两个现有视频分割框架中进行测试。在两个数据集的3D视频分割基准测试中,该方法显著提升了性能。
1 Introduction
1 引言
Video segmentation is an important pre-processing step for many high-level video applications such as action recognition [1], scene understanding [2], or 3D reconstruction [3]. A more compact representation not only reduces the subsequent processing space and time requirements, but also provides sets of visual segments that contain meaningful cues for higher-level computer vision tasks. However, generating super vox els from videos is a significantly more difficult task than superpixel segmentation from images, due to the heavy computational cost and the extra temporal dimension. Specifically, well delineated spatio-temporal video segments can be used for tracking bounded regions, foreground moving objects, or semantic understanding. For example, locating the movement of hands is helpful for gesture or action recognition, and separating foreground/background can pin-point the region-of-interest for detecting moving objects. Therefore, these spatio-temporal segments should be temporally consistent in order to be beneficial for these computer vision tasks.
视频分割是许多高级视频应用的重要预处理步骤,例如动作识别 [1]、场景理解 [2] 或 3D 重建 [3]。更紧凑的表示不仅能减少后续处理的空间和时间需求,还能提供包含高级计算机视觉任务有意义线索的视觉片段集合。然而,由于高昂的计算成本和额外的时间维度,从视频生成超体素 (super voxel) 比从图像生成超像素 (superpixel) 分割要困难得多。具体而言,清晰划分的时空视频片段可用于跟踪边界区域、前景运动物体或语义理解。例如,定位手部运动有助于手势或动作识别,而分离前景/背景可以精确定位检测运动物体的感兴趣区域。因此,这些时空片段需要保持时间一致性才能对这些计算机视觉任务有益。
For video segmentation s that are initialized from super pixels, the main goal is to consider the connections between neighboring super pixels and to decide which ones belong to the same spatio-temporal cluster. The connections are usually represented as a spatio-temporal graph, where the nodes are the super pixels and the edges connect super pixels that are adjacent to each other. The edges are weighted based on the similarity distances between pairs of super pixels. Previous work [4, 5] proposed a variety of features corresponding to a wide range of low and mid-level image cues from super pixels. For example, the within-frame similarities were computed from boundary magnitude, color, texture, and shape, and the temporal connections were defined by the direction of optical flow or motion trajectories. Importantly, the aforementioned features that were used for video segmentation encode only local information, extracted from within each superpixel. One would expect improved performance when combining local and global features, if the appropriate global features per superpixel were extracted.
对于从超像素初始化的视频分割,其主要目标是考虑相邻超像素之间的连接关系,并确定哪些属于同一时空簇。这些连接通常表示为时空图,其中节点是超像素,边连接彼此相邻的超像素。边的权重基于超像素对之间的相似性距离计算。先前工作[4,5]提出了多种特征,对应超像素中各种低层和中层图像线索。例如,帧内相似性通过边界强度、颜色、纹理和形状计算,而时间连接则由光流方向或运动轨迹定义。值得注意的是,上述用于视频分割的特征仅编码从每个超像素内部提取的局部信息。若能提取每个超像素的适当全局特征,结合局部与全局特征可预期性能提升。
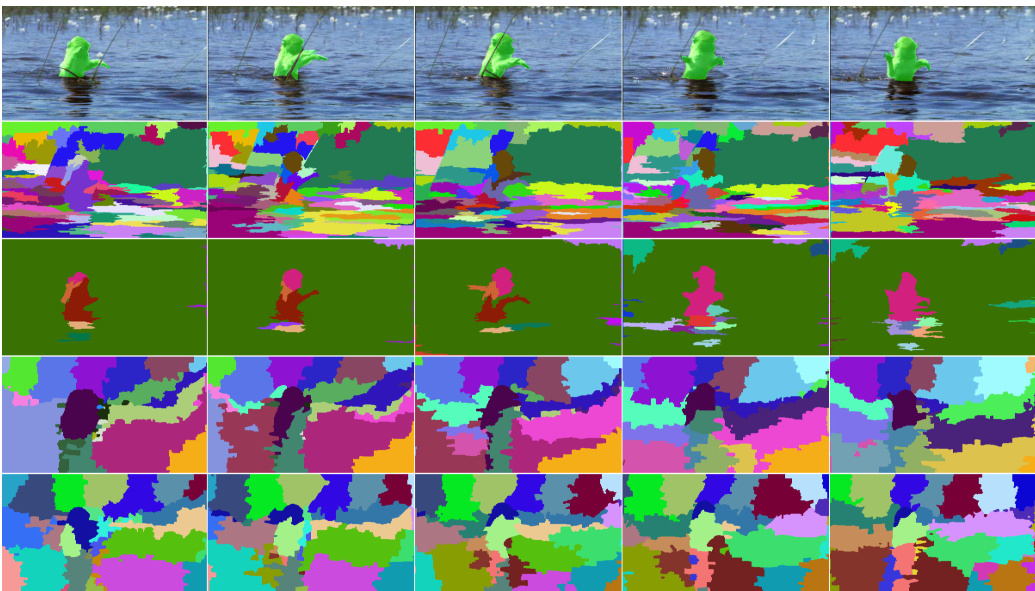
Fig. 1: The segmentation results on video “monkey” from Segtrack v2 dataset [6]. Top row: original frames with superimposed ground-truth (green). Second row: segmentation results of the PGP algorithm ([7]) using their four predefined features. Third row: result of PGP with our feature integrated. Fourth row: segmentation result of spectral clustering with the6 features proposed in [8]. Bottom row: segmentation result of spectral clustering with our feature integrated. Our results show better temporal consistency and less over-segmentation.
图 1: Segtrack v2数据集[6]中视频"monkey"的分割结果。首行: 叠加真实标注(绿色)的原始帧。第二行: 使用四种预定义特征的PGP算法([7])分割结果。第三行: 整合我们特征的PGP算法结果。第四行: 采用文献[8]提出的6个特征的谱聚类分割结果。末行: 整合我们特征的谱聚类分割结果。我们的方法展现出更好的时间一致性和更少的过分割现象。
The geodesic distance has been shown to be effective for image segmentation problems [9, 10] but its applications in the video domain have been limited [11, 10, 12, 13]. In this work, we propose a complete methodology for the use of geodesic distance histogram features in the video segmentation problem. The histogram feature describes the superpixel-of-interest by the distribution of the geodesic distances from it, to all other super pixels in the same frame. The representation compactly encodes global similarity relations between segments. Thus, we want to use per-frame geodesic distance information to associate super pixels both within and across frames. However, the nature of this global representation, poses several challenges that need to be addressed, in order to successfully use geodesic distance histograms for video segmentation:
测地线距离 (geodesic distance) 已被证明能有效解决图像分割问题 [9, 10],但它在视频领域的应用仍十分有限 [11, 10, 12, 13]。本文提出了一套完整的方法论,将测地线距离直方图特征应用于视频分割问题。该直方图特征通过计算目标超像素 (superpixel-of-interest) 与同帧其他所有超像素之间的测地线距离分布来描述其特征。这种表示方法能紧凑地编码分割区域间的全局相似性关系。因此,我们希望利用逐帧测地线距离信息来建立帧内及帧间超像素的关联。然而,这种全局表示的特性带来了若干挑战,必须解决这些挑战才能成功将测地线距离直方图应用于视频分割:
In this paper, we address these issues in order to derive a geodesic histogram feature that is appropriate for video segmentation tasks. In essence, we introduce the necessary local information in the global representation, in order to disambiguate associations across frames. For a given superpixel, we first extract the soft boundary map of the frame where it belongs, then we compute geodesic distances from the superpixel-of-interest to all other super pixels in the same frame using the boundary scores. If we were performing per frame segmentation, a 1D histogram of these scores would suffice [10]. However, due to motion, this 1D histogram is not robust across frames. As observed previously [13], a 2D joint histogram of intensity and geodesic distance is much more robust. To encode more spatial information into the feature, we compute multiple geodesic histograms in a spatial pyramid [14]. Finally, we weigh the bins with respect to their spatial distance from the superpixel-of-interest, in order to favor potentially discriminative neighborhood information. We show in experiments that when we add our complete geodesic histogram feature into existing frameworks, the resulting segmentation s are greatly improved, especially in 3D segmentation accuracy and temporal consistency. The feature is also fast to compute, without increasing significantly processing time for the existing frameworks. The geodesic histogram features are added into two state-of-the-art video segmentation frameworks that are based on superpixel clustering, and tested on two popular datasets using standard 3D segmentation benchmarks.
本文针对这些问题,提出了一种适用于视频分割任务的测地直方图特征。其核心思想是在全局表征中引入必要的局部信息,以消除跨帧关联的歧义性。对于给定超像素,我们首先提取其所属帧的软边界图,随后利用边界得分计算该目标超像素到同帧内所有其他超像素的测地距离。若进行逐帧分割,这些得分的1D直方图即可满足需求[10]。但由于运动因素,这种1D直方图在跨帧时缺乏鲁棒性。如先前研究[13]所示,强度与测地距离的2D联合直方图具有更强的鲁棒性。为在特征中编码更多空间信息,我们在空间金字塔[14]中计算多重测地直方图。最后,根据各分箱与目标超像素的空间距离进行加权,以增强潜在判别性邻域信息。实验表明,当我们将完整的测地直方图特征加入现有框架时,分割结果(特别是3D分割精度与时序一致性)获得显著提升。该特征计算速度快,不会显著增加现有框架的处理时间。我们将测地直方图特征集成到两个基于超像素聚类的前沿视频分割框架中,并采用标准3D分割基准在两个流行数据集上进行测试。
The rest of paper is organized as follows: Section 2 discusses related work. Section 3 discusses the motivation, computation, and analysis of the proposed geodesic histogram features. Implementation details are described in Section 3.4. Section 4 presents the experimental results. Section 5 concludes the paper and discusses other possible applications.
本文其余部分组织结构如下:第2节讨论相关工作。第3节阐述所提出的测地直方图特征 (geodesic histogram features) 的动机、计算和分析,具体实现细节见第3.4节。第4节展示实验结果。第5节总结全文并探讨其他潜在应用场景。
2 Related Work
2 相关工作
Many video segmentation works propose diverse features to capture various kinds of information in order to estimate the similarity between the components of the video. Appearance can be represented by features based on color [5, 15], texture [16], and soft boundaries [17]. Motion related features have also been utilized often, including short-term motion features based on optical flow [18, 19] and long-term motion features based on trajectories [20, 21, 22, 23]. Superpixel shape is used to compute the similarities among super pixels across frames [15]. Some works discuss the choice of features to use [8] as well as the method to incorporate various kinds of features into affinity matrices [4].
许多视频分割工作提出了多种特征来捕捉各类信息,以估计视频组件之间的相似性。外观可通过基于颜色 [5, 15]、纹理 [16] 和软边界 [17] 的特征来表示。运动相关特征也常被使用,包括基于光流的短期运动特征 [18, 19] 和基于轨迹的长期运动特征 [20, 21, 22, 23]。超像素形状用于计算跨帧超像素之间的相似性 [15]。部分研究探讨了特征的选择 [8] 以及将各类特征整合到亲和力矩阵中的方法 [4]。
Geodesic distances provide appearance-based similarity estimates. Geodesic distances have been applied widely on segmentation related problems on images [9, 13, 10]. A feature based on geodesic distance for matching images of deformed objects has been introduced in [13]. The authors showed that the geodesic distance could be invariant to object deformations, by encoding pixels as color histograms on the surrounding pixels that have the same geodesic distances. The geodesic distance is also used to propose object segments on images [9], which is based on the correlation between the object boundary and the change in the geodesic distance transform. Several video segmentation methods have employed geodesic distance for various purposes. The salient object segmentation framework uses a geodesic distance in each frame to estimate the objectness of super pixels [11] on a per frame basis. Further work further proposes a spatio-temporal geodesic distance [10] that extends image segmentation to video segmentation. However, the proposed spatio-temporal distance has to be constrained to be temporally non-decreasing to preserve the metric property, thus limiting the robustness of the method.
测地距离提供基于外观的相似性估计。测地距离已广泛应用于图像分割相关问题[9,13,10]。文献[13]提出了一种基于测地距离的特征,用于匹配变形物体的图像。作者表明,通过将像素编码为具有相同测地距离的周围像素的颜色直方图,测地距离可以不受物体变形的影响。测地距离还被用于提出图像上的物体分割[9],该方法基于物体边界与测地距离变换变化之间的相关性。多种视频分割方法出于不同目的采用了测地距离。显著物体分割框架在每帧中使用测地距离来估计超像素的物体性[11]。进一步的研究提出了时空测地距离[10],将图像分割扩展到视频分割。然而,所提出的时空距离必须约束为时间非递减以保持度量属性,从而限制了该方法的鲁棒性。
In this paper, we propose a feature based on geodesic distance to estimate the similarity between the super pixels in the video. We consider the frame-wise distribution of the geodesic distances, i.e., the histogram of geodesic distances from each superpixel to all other super pixels in the same frame. This representation compactly encodes the relative similarity distances between the segment containing the superpixel-of-interest to all the other segments on the frame. This global information therefore serves as a complement to the set of to the set of appearance, motion, and shape-based features which only encode information from the inner region of the superpixel-of-interest.
本文提出了一种基于测地线距离的特征,用于估计视频中超像素之间的相似性。我们考虑了测地线距离的逐帧分布,即同一帧中每个超像素到所有其他超像素的测地线距离直方图。该表示方法紧凑地编码了包含目标超像素的片段与帧上所有其他片段之间的相对相似距离。因此,这种全局信息可作为外观、运动和基于形状的特征集的补充,这些特征仅编码来自目标超像素内部区域的信息。
3 Geodesic Distance Histogram Feature
3 测地距离直方图特征
Given a frame of the video, let $X$ be the set of super pixels: $X={x_{1},\ldots,x_{n}}$ . The frame is then represented by a non-negative, undirected graph $G=(X,E)$ , where each value in $E$ is associated with a pair of neighboring super pixels in $X$ , and the edge weight is computed as the boundary strength between the two super pixels. The geodesic distance between any two super pixels $x_{i},x_{j}\in X$ is defined as the weight of the shortest path between the two super pixels in $G$ .
给定视频的一帧,设 $X$ 为超像素(super pixel)集合:$X={x_{1},\ldots,x_{n}}$。该帧可表示为非负无向图 $G=(X,E)$,其中 $E$ 的每个值对应 $X$ 中相邻超像素对,边权重计算为两个超像素间的边界强度。任意两个超像素 $x_{i},x_{j}\in X$ 之间的测地距离(geodesic distance)定义为 $G$ 中两超像素最短路径的权重。
Given a superpixel $x_{i}$ on a frame, the geodesic distance between $x_{i}$ and all other super pixels in the same frame is computed and pooled into a geodesic distance histogram. This histogram contains the global information of the frame with respect to $x_{i}$ in terms of geodesic distance distribution, and can be used for computing pair-wise superpixel similarity both within and across frames.
给定帧上的一个超像素 $x_{i}$,计算其与同帧内所有其他超像素的测地距离,并汇总为测地距离直方图。该直方图以测地距离分布形式蕴含了帧相对于 $x_{i}$ 的全局信息,可用于计算帧内及跨帧的超像素对相似度。
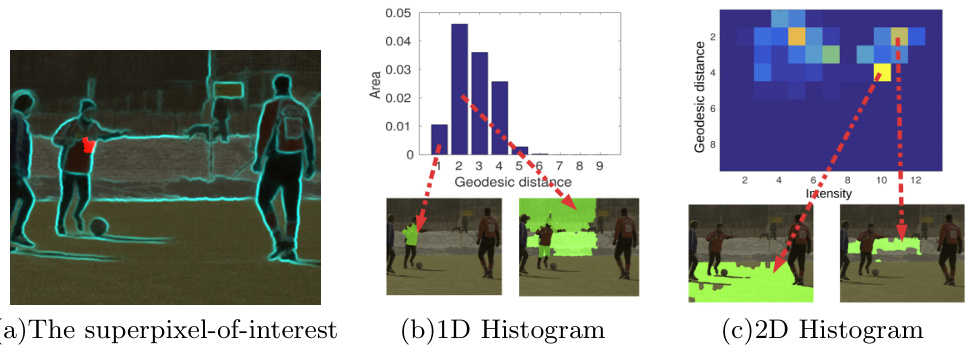
Fig. 2: The figure shows an example of 1D (geodesic distances) and 2D (intensitygeodesic distances) histogram features. (a): frame 1 of video “soccer” from Chen’s Xiph.org dataset [24], with soft boundary scores highlighted, and a superpixel-ofinterest marked in red. (b) and (c): the 1D and 2D histograms of the superpixelof-interest, and the frame regions (green) that correspond to the selected bins and cells of the 1D and 2D histograms, respectively. (b) shows that the bins of the 1D histogram contain mixed information, while the cells in (c) contain regions that are more semantically homogeneous.
图 2: 该图展示了1D (测地距离) 和2D (强度-测地距离) 直方图特征的示例。(a): Chen的Xiph.org数据集[24]中视频"soccer"的第1帧, 高亮显示了软边界分数, 并用红色标记了感兴趣的超像素。(b) 和 (c): 感兴趣超像素的1D和2D直方图, 以及分别对应1D和2D直方图所选区间和单元的帧区域 (绿色)。(b) 显示1D直方图的区间包含混合信息, 而 (c) 中的单元包含语义更同质的区域。
3.1 1D Geodesic Distance Histogram.
3.1 一维测地距离直方图
The simplest approach is to use an 1D histogram to describe the distribution of the geodesic distances, where a bin of the histogram represents the number of super pixels with a particular geodesic distance. This is similar to the concept of critical level sets [9], where each critical level defines a group of super pixels having their geodesic distances less than a certain threshold. Each bin of the histogram is then associated with a region in the image.
最简单的方法是使用一维直方图来描述测地距离的分布,其中直方图的每个区间代表具有特定测地距离的超像素数量。这与关键水平集 [9] 的概念类似,其中每个关键水平定义了一组测地距离小于特定阈值的超像素。直方图的每个区间随后与图像中的一个区域相关联。
In order to keep our feature relatively constant across frames, the value of each bin should stay approximately the same. This means that the regions associated with each bin also remain relatively stable. Considering the superpixel (in red) shown in Fig. 2(a), two regions corresponding to the first two bins of the histogram are visualized in Fig. 2(b). The first bin collects the votes of all superpixels with the lowest geodesic distance interval, forming the region indicated by the leftmost arrow. However, the region corresponding to the second bin is the combination of super pixels from different semantic regions. The value of the second bin is therefore not robust since these regions could potentially move in different ways, and end up voting for different bins in subsequent frames.
为了使我们的特征在帧间保持相对稳定,每个直方图条柱(bin)的数值应大致保持不变。这意味着与每个条柱相关联的区域也需保持相对稳定。以图2(a)中红色标注的超像素(superpixel)为例,图2(b)可视化了直方图前两个条柱对应的两个区域。第一个条柱汇集了所有具有最低测地距离区间的超像素投票,形成最左侧箭头指示的区域。然而,第二个条柱对应的区域却混合了来自不同语义区域的超像素。因此第二个条柱的数值不具备鲁棒性,因为这些区域可能会以不同方式移动,最终在后续帧中投票给不同的条柱。
3.2 2D Intensity-Geodesic Distance Histogram.
3.2 二维强度-测地距离直方图
We incorporate the intensity feature as an additional cue to complement the geodesic distance, on order to constrain bins to correspond to individual regions instead of disparate groups of regions. Thus the histogram becomes a 2D table where each cell is voted for by the super pixels that have a particular pair of geodesic distance and intensity. The joint distribution of intensity-geodesic distance was originally proposed in [13], where the joint distribution was expected to be stable and informative under a wide range of deformations.
我们将强度特征作为补充线索与测地距离结合,以约束分箱对应独立区域而非分散的区域组。因此直方图转化为二维表格,其中每个单元格由具有特定测地距离-强度值对的超像素投票生成。这种强度-测地距离联合分布最初由[13]提出,该研究预期该联合分布在多种形变下能保持稳定性和信息量。
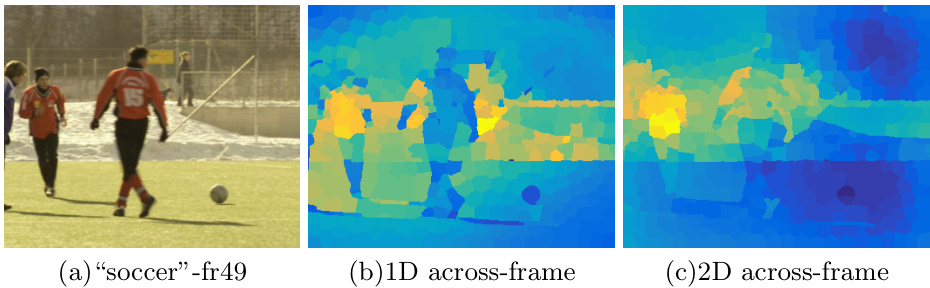
Fig. 3: The figures visualize the similarities between the superpixel-of-interest in Fig. 2(a) on a later frame (frame 49) to all other super pixels. Warmer color represents higher similarity. (a): original frame. (b): the similarity map based on 1D geodesic distance histograms. (c): the similarity map based on 2D intensity-geodesic distance histograms. The figure shows that the 2D histogram is more robust than the 1D histogram for across-frame matching: there are multiple super pixels located in multiple regions that have similar 1D histograms with the superpixel-of-interest, while only the super pixels located within the upper-body region have the most similar 2D histograms.
图 3: 这些图展示了图 2(a) 中感兴趣的超像素在后续帧(第49帧)与所有其他超像素之间的相似性。暖色调表示更高的相似度。(a): 原始帧。(b): 基于一维测地距离直方图的相似性图。(c): 基于二维强度-测地距离直方图的相似性图。该图表明,对于跨帧匹配,二维直方图比一维直方图更具鲁棒性:存在多个位于不同区域的超像素与感兴趣超像素具有相似的一维直方图,而只有位于上半身区域的超像素具有最相似的二维直方图。
Fig. 2(c) visualizes the intensity-geodesic distance histogram of a superpixelof-interest (shown in red in Fig. 2(a)). Notice that the second bin of the 1D histogram equals to the sum of all cells in the second row of the 2D histogram, and the region from the second bin in the 1D histogram is now separated into multiple smaller regions corresponding to these cells. This is a desired effect given that each of the cells in the 2D histogram contains super pixels from the same semantic region as the 1D case. We also visualized the cell with the highest value in Fig. 2(c), which corresponds to the super pixels within the entire grass field. Such a region is likely to be stable across frames and remain connected. This implies that as long as the intermediate boundaries remain the same, these regions would still contribute to the same cells in the histogram.
图 2(c) 展示了目标超像素(图 2(a) 中红色标记部分)的强度-测地距离直方图。值得注意的是,一维直方图的第二个柱状区间等于二维直方图第二行所有单元格的累加值,且一维直方图第二个柱状区间对应的区域现被细分为与这些单元格对应的多个子区域。这种效果符合预期,因为二维直方图中每个单元格包含的超像素与一维情况同属一个语义区域。我们在图 2(c) 中还标注了数值最大的单元格,该区域对应整片草场范围内的超像素。这类区域在连续帧间往往保持稳定且连通,这意味着只要中间边界保持不变,这些区域仍会对直方图中相同单元格产生贡献。
To compute the similarity distance between two histograms, we can use the $\chi^{2}$ distance or the Earth Mover’s Distance. Following [13], the $\chi^{2}$ distance between two 2D histograms $H_{p}$ and $H_{q}$ with size $M\times N$ is defined by:
为了计算两个直方图之间的相似距离,我们可以使用 $\chi^{2}$ 距离或推土机距离 (Earth Mover’s Distance)。根据 [13],大小为 $M\times N$ 的两个二维直方图 $H_{p}$ 和 $H_{q}$ 之间的 $\chi^{2}$ 距离定义为:
$$
\chi^{2}(H_{p},H_{q})={\frac{1}{2}}{\sum}_{k=1}^{K}{\sum}_{m=1}^{M}{\frac{[H_{p}(k,m)-H_{q}(k,m)]^{2}}{H_{p}(k,m)+H_{q}(k,m)}}
$$
$$
\chi^{2}(H_{p},H_{q})={\frac{1}{2}}{\sum}_{k=1}^{K}{\sum}_{m=1}^{M}{\frac{[H_{p}(k,m)-H_{q}(k,m)]^{2}}{H_{p}(k,m)+H_{q}(k,m)}}
$$
The Earth Mover’s Distance (EMD) is computed as the sum of the 1D EMDs at each intensity bin of the 2D histogram.
推土机距离 (Earth Mover’s Distance, EMD) 通过计算二维直方图每个强度区间的1D EMD之和获得。
Fig. 3 visualizes the similarity values computed based on 1D and 2D feature histograms from the superpixel-of-interest in Fig. 2(a) on a later video frame. In the color scheme, higher similarity is represented by the warmer color. The figure shows that the 1D histogram is less robust than the 2D histogram: there are multiple regions having similar 1D histograms with the superpixel-of-interest, and the superpixel with the highest 1D histogram similarity is in the background. In contrast, the superpixel with the highest similarity using the 2D histogram falls within the same upper-body region, a desirable result.
图 3 展示了基于图 2(a) 中感兴趣超像素的 1D 和 2D 特征直方图在后续视频帧上计算的相似度值。在配色方案中,较高的相似度用较暖的颜色表示。该图显示 1D 直方图比 2D 直方图的鲁棒性更低:存在多个区域与感兴趣超像素具有相似的 1D 直方图,且 1D 直方图相似度最高的超像素位于背景中。相比之下,使用 2D 直方图获得最高相似度的超像素位于同一上半身区域,这是理想的结果。
3.3 Spatial Information
3.3 空间信息
Pooling methods such as histograms discard spatial information, such as image distance relationships or local neighborhood patterns. We encode spatial cues in two ways: 1) by embedding spatial distances into the voting weight of each superpixel, and 2) by adopting a commonly used spatial pyramid scheme [14].
直方图等池化方法会丢弃空间信息,例如图像距离关系或局部邻域模式。我们通过两种方式编码空间线索:1) 将空间距离嵌入每个超像素的投票权重中;2) 采用常用的空间金字塔方案 [14]。
Spatial distance voting weight For a given superpixel $x$ , its histogram feature is constructed by its intensity and geodesic distances to all other pixels in the same frame. To take the spatial location of these other super pixels into account, the geodesic distances are weighted by the spatial distance of those super pixels to $x$ . In particular, the weighting of superpixel $y$ to the histogram bins of superpixel $x$ in frame $f$ is defined by:
空间距离投票权重 对于给定的超像素 $x$,其直方图特征由强度值及与同帧其他像素的测地距离构成。为考虑其他超像素的空间位置关系,这些测地距离会根据对应超像素与 $x$ 的空间距离进行加权。具体而言,在帧 $f$ 中超像素 $y$ 对超像素 $x$ 直方图分箱的加权计算定义为:
$$
w e i g h t_{y}=\frac{|y|}{|f|}\times\exp(-\mu\times L_{2}(x,y))
$$
$$
w e i g h t_{y}=\frac{|y|}{|f|}\times\exp(-\mu\times L_{2}(x,y))
$$
where $\left|\cdot\right|$ is the area and $L_{2}(\cdot)$ is the Euclidean distance between two super pixels center locations.
其中 $\left|\cdot\right|$ 表示面积,$L_{2}(\cdot)$ 表示两个超像素中心位置之间的欧氏距离。
The area component normalizes the influence of super pixels of different sizes. The exponential ensures that nearby super pixels contribute more to the geodesic histogram of $x$ . This is especially helpful for super pixels that belong to smaller segments, for which most other super pixels have large geodesic distances, that would dominate the histogram. Hence two small regions that are locally different would have very similar histograms. The parameter $\mu$ of the exponential controls the trade-off between global and local information.
面积分量用于归一化不同大小超像素的影响。指数项确保邻近超像素对$x$的测地直方图贡献更大,这对属于较小分段的超像素尤为重要——由于其他多数超像素具有较大测地距离会主导直方图,若不如此,两个局部不同的小区域将产生高度相似的直方图。指数中的参数$\mu$控制着全局与局部信息的平衡。
Spatial pyramid histogram Inspired by the popularity of spatial pyramids [14], we incorporated the pyramid scheme into the construction of our feature histogram to encode more spatial information into the features. We implemented two scales of the spatial pyramid: 1x1 and 2x2 grids over a given frame. A histogram is extracted from each cell of the grid. Histograms from the same scale are concatenated.
空间金字塔直方图
受空间金字塔 [14] 流行度的启发,我们将金字塔方案融入特征直方图的构建中,以将更多空间信息编码到特征中。我们实现了两种尺度的空间金字塔:在给定帧上使用1x1和2x2的网格。从网格的每个单元中提取一个直方图,并将同一尺度的直方图进行拼接。
3.4 Implementation Details
3.4 实现细节
Our features are constructed from the intensity and boundary probability maps. For more robust boundary extraction, we also experiment with two different boundary map methods: spatial edge maps using structured forests [25], and motion boundary maps using the method proposed in [26].
我们的特征基于强度和边界概率图构建。为了获得更稳健的边界提取效果,我们还实验了两种不同的边界图方法:使用结构化森林 [25] 生成的空间边缘图,以及采用 [26] 所提方法生成的运动边界图。
Given the combined edge map and the superpixel graph, the geodesic distance feature for each superpixel is computed using Dijkstra’s algorithm in $O(|X||E|l o g|X|)$ , with the cost of a path being the accumulated boundary scores between one superpixel to another.
给定组合边缘图和超像素图,每个超像素的测地距离特征使用 Dijkstra 算法在 $O(|X||E|l o g|X|)$ 时间内计算得出,路径成本为从一个超像素到另一个超像素之间累积的边界得分。
We empirically set the intensity dimension of the feature histogram at 13 bins, and the geodesic dimension at 9 bins.
我们经验性地将特征直方图的强度维度设为13个区间,测地维度设为9个区间。
4 Experiments
4 实验
In this section, we describe our experiments using the geodesic histogram features for video segmentation. We incorporated our features into two existing frameworks that are based on different clustering algorithms: spectral clustering [8] and parametric graph partitioning [7]. Spectral clustering performs dimensionality reduction on an affinity matrix based on eigenvalues, while parametric graph partitioning directly performs the clustering on the superpixel graph by modeling $L_{p}$ affinity matrices probabilistic ally. Also, the method in [8] generates coarse-to-fine hierarchical segmentation results, while [7] only outputs a single level of segmentation.
在本节中,我们描述了利用测地线直方图特征进行视频分割的实验。我们将这些特征整合到基于两种不同聚类算法的现有框架中:谱聚类 [8] 和参数化图分割 [7] 。谱聚类基于特征值对亲和矩阵进行降维处理,而参数化图分割则通过概率化建模 $L_{p}$ 亲和矩阵直接在超像素图上执行聚类。此外,[8] 中的方法生成由粗到细的分层分割结果,而 [7] 仅输出单层分割。
The experiments were conducted on the Segtrack V2 [6] and Chen’s Xiph.org [24] datasets, covering a wide range of scenarios for evaluating video segmentation algorithms. We evaluate our segmentation results using the metrics proposed in [27], including 3D Accuracy (AC), 3D Under-segmentation Error (UE), 3D Boundary Recall (BR), and 3D Boundary Precision (BP). All experiments were conducted with the exact same set of initial super pixels and other parameter settings.
实验在Segtrack V2 [6]和Chen's Xiph.org [24]数据集上进行,涵盖了评估视频分割算法的多种场景。我们采用[27]提出的指标评估分割结果,包括三维准确率(AC)、三维欠分割错误(UE)、三维边界召回率(BR)和三维边界精确率(BP)。所有实验均采用完全相同的初始超像素集及其他参数设置。
4.1 Video Segmentation Using Spectral Clustering
4.1 基于谱聚类 (Spectral Clustering) 的视频分割
We first evaluate the performance of the framework by adding our feature to spectral clustering [8]. We use the same 6 features as [8]: short term temporal, long term temporal, spatio temporal appearance, spatio temporal motion, across boundary appearance, and across boundary motion. The affinity matrix was computed by combining the 6 affinity matrices computed from each feature. We combined the original computed affinity matrix with the geodesic histogram features in order to preserve the algorithm settings and superpixel configurations. The similarity distances based on our features were computed using the $\chi^{2}$ distance.
我们首先通过将我们的特征添加到谱聚类 [8] 中来评估框架的性能。我们使用与 [8] 相同的6个特征:短期时间、长期时间、时空外观、时空运动、跨边界外观和跨边界运动。通过组合从每个特征计算的6个亲和矩阵来计算亲和矩阵。我们将原始计算的亲和矩阵与测地直方图特征相结合,以保留算法设置和超像素配置。基于我们特征的相似性距离使用 $\chi^{2}$ 距离计算。
Fig. 4 shows the evaluation results of spectral clustering with and without our feature on Segtrack v2 and Chen Xiph.org datasets. We tested four settings of our feature: (i) 2D histogram using only spatial edge maps to compute geodesic distances and without spatial distance voting weight (2D - 0), (ii) 2D histogram using spatial edge maps and spatial distance voting weight with $\mu=0.02$ (2D - 0.02 ), (iii) 2D histogram using both spatial edge and motion boundary maps with $\mu=0.02$ (2D $^+$ 0.02) and, (iv) 2D histograms with spatial pyramid (2D + 0.02 sp). Compared to the baseline, our feature significantly improved segmentation performance. The improvement was most significant in 3D accuracy: increased by 5% for Segtrack v2 and $10%$ for Chen Xiph.org. For Segtrack v2 dataset, our feature was able to improve the segmentation results on all four metrics. For Chen Xiph.org dataset, the feature gave a strong boost to 3D accuracy and 3D boundary precision. For all settings tested, we noticed that motion boundary maps did not affect performance much. Given that motion boundary map generation requires optic flow computation, which can be time consuming, its omission might result in faster implementations. The spatial distance voting weights had a strong impact on the results and clearly improved segmentation.
图 4 展示了在 Segtrack v2 和 Chen Xiph.org 数据集上使用与不使用我们特征的谱聚类评估结果。我们测试了四种特征设置:(i) 仅使用空间边缘图计算测地距离且不含空间距离投票权重的二维直方图 (2D - 0)、(ii) 使用空间边缘图且空间距离投票权重 $\mu=0.02$ 的二维直方图 (2D - 0.02)、(iii) 同时使用空间边缘和运动边界图且 $\mu=0.02$ 的二维直方图 (2D$^+$0.02)、(iv) 带空间金字塔的二维直方图 (2D + 0.02 sp)。与基线相比,我们的特征显著提升了分割性能,其中三维准确率提升最为明显:Segtrack v2 提高 5%,Chen Xiph.org 提高 $10%$。在 Segtrack v2 数据集上,我们的特征在所有四个指标上均能改善分割结果;对于 Chen Xiph.org 数据集,该特征大幅提升了三维准确率和三维边界精度。所有测试设置中,运动边界图对性能影响较小。考虑到运动边界图生成需要耗时计算光流,省略该步骤可加速实现。空间距离投票权重对结果有显著影响,能明确提升分割效果。

Fig. 4: Performance of spectral clustering (SC) [8] on the Segtrack v2 dataset, using four metrics: 3D Accuracy, 3D Under Segmentation Error, 3D Boundary Recall, and 3D Boundary Precision. For the 3D under-segmentation metric, the lower the error the better. For all the other metrics, the higher the score the better. -: using only spatial boundary edge. +: spatial boundary edge and motion boundary edge combined. 0: using spatial voting weight with $\mu=0$ . 0.02: $\mu=0.02$ . sp: with spatial pyramid. These plots show that the addition of our features result in major improvements on 3D Accuracy, and minor but consistent improvements on the three remaining metrics.
图 4: 谱聚类 (SC) [8] 在 Segtrack v2 数据集上的性能表现,使用四个评估指标:3D 准确率、3D 欠分割错误率、3D 边界召回率和 3D 边界精确率。对于 3D 欠分割指标,错误率越低越好。其他所有指标均为得分越高越好。-:仅使用空间边界边缘。+:空间边界边缘与运动边界边缘结合。0:使用空间投票权重且 $\mu=0$。0.02:$\mu=0.02$。sp:带空间金字塔。这些曲线表明,添加我们的特征使得 3D 准确率有显著提升,其余三个指标也有小幅但一致的改进。
In addition to these improvements, Fig. 6 shows that the average temporal length of super vox els consistently increased for all parameter settings of our feature by $10%$ for Segtrack v2 dataset and 5% for Chen Xiph.org dataset, showing that the segmentation results acquired better temporal consistency. Having both longer super vox els and improved segmentation metrics indicate that our feature provides additional information for more reliable temporal consistency. This is significant, since connecting more corresponding super pixels temporally is a crucial and challenging part of the video segmentation task.
除了这些改进之外,图6显示,对于Segtrack v2数据集,我们的特征在所有参数设置下超体素的平均时间长度持续增加了10%,而对于Chen Xiph.org数据集则增加了5%,这表明分割结果获得了更好的时间一致性。超体素长度增加和分割指标提升同时出现,说明我们的特征为更可靠的时间一致性提供了额外信息。这一点非常重要,因为在时间维度上连接更多对应的超像素是视频分割任务中关键且具有挑战性的部分。

Fig. 5: Performance of spectral clustering (SC) [8] on the Chen Xiph.org dataset, using four metrics: 3D Accuracy, 3D Under Segmentation Error, 3D Boundary Recall, and 3D Boundary Precision. For the 3D under-segmentation metric, the lower the error the better. For all the other metrics, the higher the score the better. -: using only spatial boundary edge. $^+$ : spatial boundary edge and motion boundary edge combined. 0: using spatial voting weight with $\mu=0$ . 0.02: $\mu=0.02$ . sp: with spatial pyramid. These plots show that the addition of our features result in major improvements on 3D Accuracy, and minor but consistent improvements on the three remaining metrics.
图 5: 谱聚类 (SC) [8] 在 Chen Xiph.org 数据集上的性能表现,使用四个指标:3D 准确率、3D 欠分割错误率、3D 边界召回率和 3D 边界精确率。对于 3D 欠分割指标,错误率越低越好。其他所有指标都是分数越高越好。-:仅使用空间边界边缘。$^+$:空间边界边缘和运动边界边缘结合。0:使用 $\mu=0$ 的空间投票权重。0.02:$\mu=0.02$。sp:带空间金字塔。这些图表显示,添加我们的特征使得 3D 准确率有显著提升,其他三个指标也有小幅但一致的改进。
An interesting qualitative example is shown in Fig. 7, showing the segmentation results for video “soldier” with only two clusters. The second row visualizes the two clusters generated by [8] using the 6 predefined features with only local information, only capturing the lower leg of the moving soldier. In contrast, the segmentation results improved with the addition of our geodesic feature. The global information that is encoded by our feature seems to have provided better information to the spectral clustering algorithm to segment the main object out of the background. Another qualitative example is shown in the 4th and 5th row of Fig. 1. The segment of the baseline shown in the 4th row shows some under-segmentation over the main moving object. This issue however, is less pronounced with our feature.
图7展示了一个有趣的定性示例,呈现了仅用两个聚类对视频"soldier"的分割结果。第二行可视化展示了[8]使用6个预定义特征(仅含局部信息)生成的两个聚类,仅捕捉到移动士兵的小腿部分。相比之下,加入我们的测地特征后分割结果有所改善。我们的特征所编码的全局信息似乎为谱聚类算法提供了更好的信息,从而将主要目标从背景中分割出来。另一个定性示例如图1第4、5行所示。第4行显示的基线分割结果对主要运动目标存在欠分割现象,而使用我们的特征后该问题明显减轻。

Fig. 6: Average temporal length of super vox els generated by spectral clustering (SC) [8] on the Segtrack v2 and Chen Xiph.org datasets. The results show significant improvements on the temporal consistency with the addition of our feature on Segtrack v2 dataset, and minor but consistent improvement on the Chen Xiph.org dataset.
图 6: 在Segtrack v2和Chen Xiph.org数据集上通过谱聚类(SC) [8]生成的超体素平均时间长度。结果显示,在Segtrack v2数据集上加入我们的特征后时间一致性有显著提升,而在Chen Xiph.org数据集上则有较小但一致的改进。

Fig. 7: The figure shows the segmentation results for the video “soldier” from the Segtrack v2 dataset using spectral clustering [8] with and without our feature. We set the number of output clusters at 2 for this example. The top row shows the original frames with the ground truth highlighted in green. The second row shows the results of spectral clustering with 6 features, as originally proposed in [8]. The third row shows the results of the algorithm when using the 6 original features plus our feature (2D histogram with spatial information). All other settings were set to be exactly the same.
图 7: 该图展示了使用谱聚类 [8] 对 Segtrack v2 数据集中视频"soldier"的分割结果,分别采用和不采用我们的特征。本示例中设置输出聚类数为2。第一行显示原始帧,真实标注用绿色高亮。第二行显示使用[8]原论文提出的6个特征的谱聚类结果。第三行显示在原始6个特征基础上加入我们的特征(带空间信息的2D直方图)后的算法结果。所有其他参数设置保持完全一致。
4.2 Video Segmentation Using Parametric Graph Partitioning.
4.2 基于参数化图分割的视频分割方法
Parametric Graph Partitioning (PGP) [7] is a recent graph-based unsupervised method that generates a single level of video segmentation. The method models edge weights by a mixture of Weibull distributions, and requires that an $L_{p}$ -norm based similarity distance to be utilized. Therefore, we conduct experiments in this section using Earth Mover’s Distance as in [7]. The baseline is the setting originally proposed in [7] which uses four feature types: intensity, the hue of the HSV color space, the AB component of LAB color space, and gradient orientation. We did not use the motion feature since it did not contribute significantly toward PGP performance as suggested in the original paper.
参数化图分割 (Parametric Graph Partitioning, PGP) [7] 是近期提出的基于图结构的无监督方法,可生成单层视频分割结果。该方法通过威布尔分布混合模型对边权重进行建模,并要求使用基于 $L_{p}$ 范数的相似性距离。因此,本节实验采用与[7]相同的推土机距离 (Earth Mover's Distance) 。基线设置沿用[7]原始方案,使用四种特征类型:强度值、HSV色彩空间的色相通道、LAB色彩空间的AB分量以及梯度方向。根据原论文建议,我们未使用运动特征,因其对PGP性能提升作用有限。

Fig. 8: The segmentation results of PGP on video “garden” from the Chen Xiph.org dataset with and without our feature. The top row shows the original frames. The second row shows the segmentation results of PGP using the 4 features proposed in [7]. The bottom row is the segmentation results of PGP using the 4 features plus our feature (2D histogram with spatial information).
图 8: PGP在Chen Xiph.org数据集"garden"视频上的分割结果对比(使用/未使用我们的特征)。首行显示原始帧画面,第二行展示PGP采用[7]中提出的4种特征的分割结果,末行为PGP采用原有4种特征叠加我们特征(带空间信息的2D直方图)的分割效果。
Tables 1 and 2 report the quantitative evaluation of PGP with and without our feature on the two datasets. We evaluated the 1D histogram feature on the Chen Xiph.org dataset, shown in Table 2. While PGP with the 1D feature outperforms the baseline in general, the benchmarks of 3 out of 8 videos decreased. On the other hand, the 2D feature significantly improved the segmentation performance of PGP. For the Segtrack v2 dataset, quantitative results in Table 1 show clear improvements of our feature for PGP, as well as the additional benefits from the spatial pyramid configuration.
表 1 和表 2 分别展示了 PGP 在两种数据集上使用与不使用我们提出的特征时的定量评估结果。我们在 Chen Xiph.org 数据集上评估了一维直方图特征 (1D histogram feature) ,如表 2 所示。虽然采用一维特征的 PGP 总体上优于基线方法,但 8 个视频中有 3 个的基准指标出现下降。另一方面,二维特征 (2D feature) 显著提升了 PGP 的分割性能。对于 Segtrack v2 数据集,表 1 中的定量结果表明我们的特征为 PGP 带来了明显改进,同时空间金字塔配置 (spatial pyramid configuration) 也带来了额外增益。
Two example cases of PGP are shown in Fig. 8, and the 2nd and 3rd row of Fig. 1. For the over-segmented scenario in Fig.1, the water was unfavorably divided into many spurious segments by the PGP baseline. Adding our feature did not only help merging the background into one segment, but also enhanced temporal consistency and boundary awareness. Given the under-segmented baseline result on the lower part of the tree shown in Fig.8, our feature helped to segment the entire tree and also reduced over-segmentation in other parts of the video.
图8展示了PGP的两个示例案例,以及图1的第2行和第3行。对于图1中的过分割场景,PGP基线方法将水面不利地分割成许多虚假片段。添加我们的特征不仅有助于将背景合并为一个片段,还增强了时间一致性和边界感知能力。针对图8中树木下部展示的欠分割基线结果,我们的特征帮助分割了整个树木,并减少了视频其他部分的过分割现象。
4.3 Feature Extraction Running Time
4.3 特征提取运行时间
All experiments were conducted on an Intel Core i7 CPU with 3.5 Ghz, and 16 Gb of memory. When adding our feature into the framework of [8], the average additional running time was increased by 67 seconds on a 85-frame video using the default parameter settings, which is a just small fraction of the total running time of several hours. The additional running time increase for the PGP framework was on average 48 seconds, with 300 initial super pixels per frame. These results show that the computational cost of our feature is low, and adds very little overhead to existing frameworks.
所有实验均在配备3.5 GHz Intel Core i7 CPU和16 GB内存的设备上完成。当我们将特征添加到[8]的框架中时,使用默认参数设置处理85帧视频的平均额外运行时间增加了67秒,这仅占总运行时间数小时的很小一部分。对于PGP框架,每帧初始化300个超像素时,平均额外运行时间增加为48秒。这些结果表明,我们的特征计算成本较低,对现有框架增加的额外开销非常小。
5 Conclusion
5 结论
In this paper, we introduced a novel feature for video segmentation based on geodesic distance histograms. The histogram is computed as a spatially-organized distribution of accumulated boundary costs between super pixels, which is a represent ation that includes more global information than conventional features. We validated the efficacy of our feature by adding it into two recent frameworks for video segmentation using spectral clustering and parametric graph partitioning, and showed that the proposed feature improved the performance of both frameworks in 3D video segmentation benchmarks, as well as the temporal consistency of the resulting super vox els. We believe that the encoded global information can be further applied to other video related tasks such as moving object tracking, object proposals, and foreground background segmentation.
本文提出了一种基于测地距离直方图的新型视频分割特征。该直方图通过计算超像素间累积边界代价的空间分布来实现,相比传统特征能包含更全局的信息。我们通过将该特征融入两种最新视频分割框架(基于谱聚类和参数化图分割)进行验证,结果表明所提特征在3D视频分割基准测试中提升了两个框架的性能,同时改善了生成超体素的时间一致性。我们相信这种编码全局信息的特征可进一步应用于其他视频相关任务,如运动目标跟踪、目标候选框生成和前背景分割。
Table 1: Quantitative evaluation on the Chen Xiph.org dataset. Best values are shown in bold. The table shows the evaluation results of the segmentation generated from the method proposed in [7] with and without our feature in two configurations: 1D geodesic distance histogram and 2D intensity-geodesic distance histogram. All videos are initialized with 300 super pixels.
表 1: Chen Xiph.org 数据集上的定量评估。最佳值以粗体显示。该表展示了文献 [7] 提出的方法在两种配置下(使用和不使用我们的特征)生成的分割评估结果:一维测地距离直方图和二维强度-测地距离直方图。所有视频均以 300 个超像素初始化。
| 指标 | 3DACC | 3DACC | 3DACC | UE3D | UE3D | UE3D | BR 3D | BR 3D | BR 3D | BP 3D | BP 3D | BP 3D |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 方法 | [7] | 1D | 2D | [7] | 1D | 2D | [7] | 1D | 2D | [2] | 1D | 2D |
| Bus_fa | 70.72 | 70.58 | 70.98 | 6.22 | 10.31 | 5.75 | 80.22 | 81.64 | 82.46 | 37.64 | 38.60 | 38.98 |
| Container_fa | 88.68 | 86.69 | 89.05 | 3.66 | 7.54 | 3.45 | 71.24 | 70.38 | 70.74 | 8.68 | 16.28 | 8.55 |
| Garden_fa | 81.69 | 83.72 | 85.46 | 1.80 | 1.68 | 1.47 | 72.46 | 77.48 | 79.91 | 12.83 | 12.73 | 12.41 |
| Ice_fa | 86.71 | 87.54 | 77.83 | 26.70 | 42.58 | 58.59 | 83.29 | 80.82 | 67.47 | 30.99 | 29.54 | 44.48 |
| Paris_fa | 40.46 | 51.37 | 61.44 | 13.50 | 12.99 | 13.15 | 47.17 | 53.73 | 56.68 | 4.22 | 4.70 | 4.73 |
| Soccer_fa | 85.79 | 83.95 | 87.04 | 4.84 | 5.46 | 2.74 | 31.37 | 30.47 | 43.35 | 5.51 | 5.20 | 5.49 |
| Salesman_fa | 83.39 | 72.54 | 84.69 | 40.48 | 54.33 | 12.41 | 73.01 | 72.76 | 79.88 | 22.41 | 19.93 | 13.47 |
| Stefan_fa | 83.56 | 81.57 | 90.14 | 6.76 | 19.80 | 4.87 | 80.66 | 74.62 | 83.30 | 10.98 | 15.16 | 11.04 |
| 平均值 | 77.62 | 77.25 | 80.83 | 12.99 | 19.34 | 12.80 | 67.43 | 67.74 | 70.47 | 16.66 | 17.77 | 17.40 |
Table 2: Quantitative evaluation on the SegTrack v2 dataset. Best values are shown in bold. The table shows the evaluation results of the segmentation generated from the algorithm proposed in [7], and two of our feature configurations: basic 2D histogram (2D) and 2D histogram with spatial information (2Dsp). The algorithms are all initialized with 300 super pixels per frame.
表 2: SegTrack v2 数据集上的定量评估。最佳值以粗体显示。该表展示了文献 [7] 提出的算法生成的 segmentation (分割) 结果,以及我们的两种特征配置:基础二维直方图 (2D) 和带空间信息的二维直方图 (2Dsp)。所有算法均以每帧 300 个超像素进行初始化。
| 指标 | 3D ACC | UE3D | BR3D | BP3D |
|---|---|---|---|---|
| 方法 | [7] | 2D | 2Dsp | [7] |
| B.o.paradise | 96.77 | 96.81 | 96.79 | 2.74 |
| Birdfall | 58.61 | 67.54 | 62.22 | 24.42 |
| Bmx-1 | 94.60 | 94.50 | 94.56 | 5.49 |
| Bmx-2 | 78.00 | 78.39 | 81.40 | 11.43 |
| Cheetah-1 | 73.26 | 75.76 | 76.35 | 30.62 |
| cheetah-2 | 63.84 | 73.68 | 69.38 | 34.64 |
| Drift-1 | 93.85 | 93.20 | 93.34 | 3.77 |
| Drift-2 | 92.43 | 92.41 | 92.06 | 3.31 |
| Frog | 56.92 | 64.72 | 86.67 | 16.32 |
| Girl | 87.71 | 89.18 | 89.18 | 10.76 |
| Hum.bird-1 | 65.07 | 73.32 | 73.27 | 9.41 |
| Hum.bird-2 | 77.71 | 84.95 | 85.52 | 6.35 |
| Monkey | 86.86 | 89.06 | 89.62 | 13.66 |
| M.dog-1 | 88.09 | 88.70 | 88.97 | 9.50 |
| M.dog-2 | 62.57 | 65.60 | 64.79 | 5.82 |
| Parachute | 92.54 | 92.31 | 92.31 | 19.54 |
| Penguin-1 | 95.72 | 23.36 | 93.45 | 3.38 |
| Penguin-2 | 95.51 | 95.77 | 95.79 | 3.39 |
| Penguin-3 | 96.49 | 96.79 | 96.48 | 3.87 |
| Penguin-4 | 95.72 | 94.50 | 94.74 | 3.87 |
| Penguin-5 | 93.27 | 92.25 | 91.63 | 8.38 |
| Penguin-6 | 92.37 | 92.64 | 93.09 | 3.73 |
| Soldier | 89.81 | 90.19 | 990.19 | 4.71 |
| Worm | 92.21 | 92.71 | 92.75 | 10.31 |
| Average | 84.16 | 83.26 | 86.86 | 10.39 |
Acknowledgement. Partially supported by the Vietnam Education Foundation, NSF IIS-1161876, FRA DT FR 5315 C 00011, the Stony Brook SensonCAT, the SubSample project from the DIGITEO Institute, France, and a gift from Adobe Corporation
致谢。部分工作由越南教育基金会、美国国家科学基金会IIS-11611676号项目、美国联邦铁路管理局DT FR 5315 C 00011号合同、石溪大学SensonCAT项目、法国DIGITEO研究院SubSample项目以及Adobe公司捐赠资助