Meet the drone that already delivers your packages, Kiva robot teardown 认识仓储机器人,Kiva机器人拆解
by Ben Einstein
February 1, 2016

There’s been a lot of talk about package delivery via flying drones. While this is an interesting vision of the future, current economics make this an unlikely substitute for base-load ground delivery for the next 5–10 years. Flying delivery drones can make a compelling marketing tool or ultra-premium feature, but their current hype doesn’t mesh with immediate reality.
Meanwhile, the robotic systems powering warehouse distribution centers are an engineering marvel far more elegant than flying drones. Tens of thousands of mobile (ground-based) drones are already in operation and helping deliver your packages today. One of these systems was originally built by a Kiva Systems based in the Boston area. I was able to get my hands on an older generation, end-of-life Kiva bot and cracked open its bright orange shell to expose a brilliant piece of engineering; this post shares the fruits of Kiva’s hard work.
关于通过飞行无人机运送包裹的讨论很多。尽管这是对未来的有趣展望,但从目前的经济状况来看,这在未来5-10年内不太可能替代基本负荷地面运输。飞行交付无人机可以成为引人注目的营销工具或超高级功能,但是它们目前的炒作并没有与现实相吻合。
同时,为仓库配送中心提供动力的机器人系统是工程奇迹,远比飞行无人机优雅。数以万计的移动(基于地面)无人机已经投入运营,并正在帮助您运送包裹。这些系统之一最初是由位于波士顿地区的Kiva Systems构建的。我能够接触到寿命较长的Kiva寿命终止机器人,并打开了亮橙色的外壳,露出了绝妙的工程设计。这篇文章分享了Kiva辛勤工作的成果。
Background 背景
Traditional distribution centers for companies like Amazon and Staples are powered by an army of people walking miles a day to pick items off shelves and plop them in a box. This process is expensive, inefficient, and error-prone. Before Kiva, the state of the art time-reducer was a bicycle.
After a stint at Webvan, Kiva founder Mick Mountz had a realization: if e-commerce distributors could move shelves to people rather than people to shelves, the pick-pack process would be massively more efficient. Mick teamed up with Pete Wurman and Raffaello D’Andrea in 2003 to found Kiva Systems to fundamentally change the way people and objects move in a warehouse.
像亚马逊和斯台普斯这样的公司的传统配送中心由每天步行数英里的大军提供动力,以将物品从货架上捡起来并放在盒子里。该过程昂贵,低效且容易出错。在Kiva之前,最先进的省时器是自行车。
在Webvan工作了一段时间之后,Kiva的创始人Mick Mountz意识到:如果电子商务分销商可以将货架转移到人们身上,而不是将人们转移到货架上,那么拣货过程将大大提高效率。米克(Mick)于2003年与皮特·沃曼(Pete Wurman)和拉斐尔·德安德里亚(Raffaello D'Andrea)合作,创立了Kiva Systems,从根本上改变了人员和物品在仓库中的移动方式
The system Kiva developed comprises on 5 key components:
- Custom designed Kiva shelves (“pods”) that are mobile and highly flexible
- A grid of 2D QR codes implanted on the floor (known as “fiducials”)
- An intelligent pack station decked out with scales, lasers, and sensors
- Herculean orange robots that swiftly lift and move the pods around the floor
- And most important of all: a complex and robust software system tying everything together
While all these components are amazing in their own right (and necessary for the system to function), this post focuses on the bright orange bots droning around the warehouse floor.
Kiva开发的系统包含5个关键组件:
- 定制设计的Kiva搁板(“吊舱”),可移动且高度灵活
- 地板上植入的二维QR码网格(称为“基准”)
- 一个配有秤,激光和传感器的智能包装站
- 凶猛的橙色机器人可迅速将豆荚在地板上抬起并移动
- 最重要的是:复杂而强大的软件系统将所有内容捆绑在一起
尽管所有这些组件本身都是令人惊叹的(并且对于系统正常运行而言是必不可少的),但本文着重介绍了在仓库地面上行驶的鲜橙色机器人。
Architecture + Mechanics 建筑与力学
In principle, the Kiva bot is pretty simple. It slowly traverses the floor reading 2D QR/Datamatrix codes every 40″ and takes commands from it’s brain in the cloud before making any movements. When it gets to a pod, the bot uses a clever lift mechanism, spinning in place to raise a ball-screw that lifts the pod a few inches off the ground.
The robots may seem simple, but consider this: pods can weigh a thousand pounds, distribution centers have tens of thousands of pods, hundreds of robots, and dozens of pack stations. One tiny collision or a dropped pod can cause many thousands of dollars of damages. This is not your granddaddy’s robot.
Each side of the outer shell has an array of IR sensors and a pneumatic bumper for collision detection and avoidance. There is also a charging port (the Kiva bots self-dock when charging) and a series of status LEDs to signal the bot’s activity. The only other major feature is the X-shaped lifter which lifts the shelving pods off the ground. Each robot has three independent axes of motion: two drive wheels and a motor for the “lifter.” As the lifter motor spins, both drive wheels counter-rotate so the lifter appears stationary while the robot spins. This reduces the number of drive components and eliminates complex hydraulic or scissor lift mechanisms.
原则上,Kiva bot非常简单。它每隔40英寸就缓慢遍历地板读取2D QR / Datamatrix代码,并在进行任何移动之前从其大脑中的云中获取命令。当机器人到达吊舱时,它会使用巧妙的举升机构,旋转到位以举起一个滚珠丝杠,从而将吊舱从地面抬起几英寸。
机器人可能看起来很简单,但请考虑以下问题:吊舱重达一千磅,配送中心有数万个吊舱,数百个机器人和数十个包装站。一次微小的碰撞或掉落的吊舱可能会造成数千美元的损失。这不是你爷爷的机器人。
外壳的每一侧都有一个红外传感器阵列和一个用于检测和避免碰撞的气动缓冲器。还有一个充电端口(充电时Kiva机器人自动停靠)和一系列状态LED指示机器人的活动。唯一的其他主要功能是X形升降器,可将搁板吊舱从地面抬起。每个机器人都有三个独立的运动轴:两个驱动轮和一个用于“升降机”的电机。当升降机马达旋转时,两个驱动轮都会反向旋转,因此在机器人旋转时,升降机看起来是静止的。这减少了驱动组件的数量,并消除了复杂的液压或剪式举升机构。

The lifter is topped off by one of several massive aluminum castings that make up the structural components of the robot. All castings are made from the same 319 general purpose alloy. Each part has a series of secondary machining operations to add referenceable surfaces and threaded holes. Many high-quality aluminum parts are made using the same process (including automotive engine blocks and hydraulic actuators).
升降机的顶部是构成机器人结构部件的多个大型铝铸件之一。所有铸件均由相同的319通用合金制成。每个零件都有一系列辅助加工操作,以添加参考表面和螺纹孔。许多高质量的铝制零件是使用相同的过程制成的(包括汽车发动机缸体和液压执行器)。
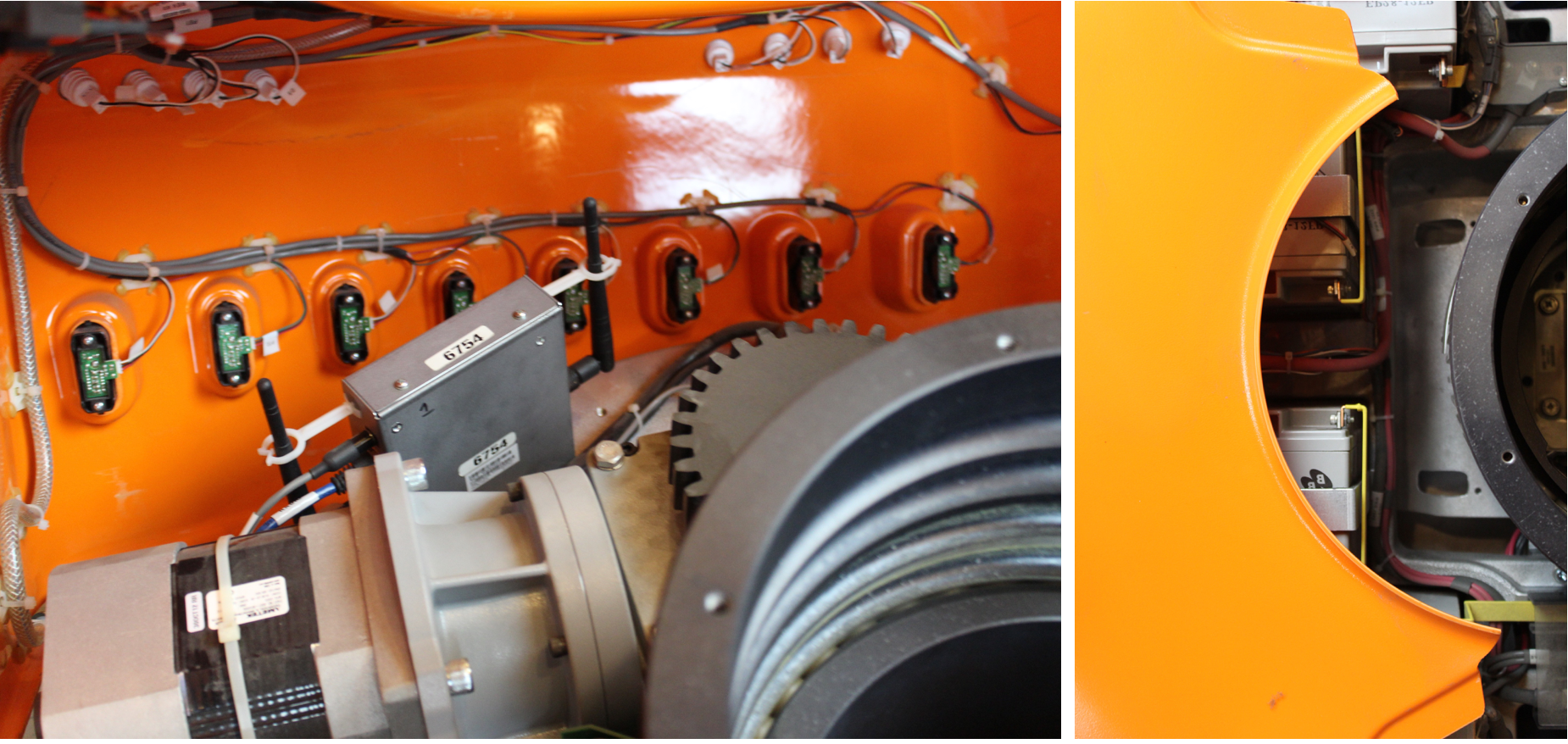
On the left: peeking into the front shell (including IR sensor array, wireless module, lifter and lifter motor). On the right: top of the lifter and the battery bank as the rear shell comes off.Each IR sensor has it’s own filter logic built-in and communicates over a serial bus. You can also see the wireless control module and the lifter motor and giant pinion gear. Towards the rear of the bot, there are four lead-acid batteries and high-amperage bus bars.
左侧:窥视前壳(包括红外传感器阵列,无线模块,提升器和提升器马达)。右侧:后壳脱落时,升降机和电池组的顶部。每个红外传感器都内置有自己的滤波器逻辑,并通过串行总线进行通信。您还可以看到无线控制模块以及升降机马达和大齿轮。在机器人的后部,有四个铅酸电池和高电流母线。

Both fairing halves are made from vacuum-formed ABS. There are a large number of features which can only be made by multiple secondary machining setups. Both the vacuum former and the CNC mill/router used to make these parts must be extremely large. This part is complex/expensive enough that I’d be surprised if later revisions of the Kiva bot aren’t injection molded.
两个整流罩半部均由真空成型的ABS制成。有许多功能只能通过多个辅助加工设置来实现。用于制造这些零件的真空成型机和CNC铣床/铣刨机都必须非常大。这部分非常复杂/昂贵,如果不对Kiva bot的更高版本进行注塑成型,我会感到惊讶。
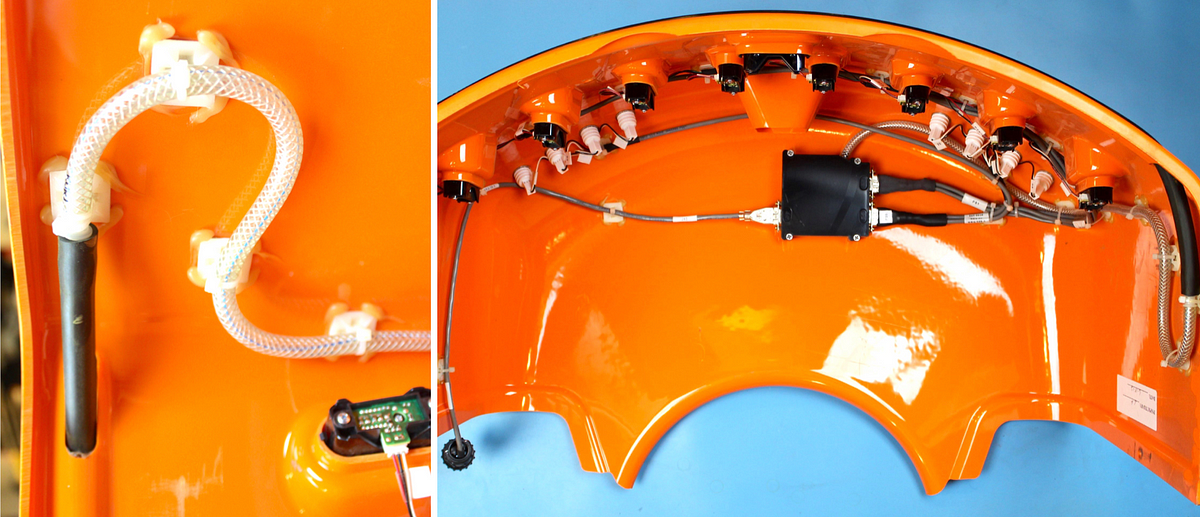 Brilliant bump sensor is super reliable and cost-effective for outfitting a large curved surface.Rather than building full-length bump sensors, which is notoriously difficult to do on curved surfaces like those on the front/back of the bot, Kiva engineers found a simple, cost effective solution. They utilized vinyl/rubber tubing and a simple pressure sensor so that as soon as a change in pressure is detected, the robot stops all movement. The black box in the right picture receives the pressure line and aggregates all the IR sensors to simplify the protocol and wiring to the main controller.
Brilliant bump sensor is super reliable and cost-effective for outfitting a large curved surface.Rather than building full-length bump sensors, which is notoriously difficult to do on curved surfaces like those on the front/back of the bot, Kiva engineers found a simple, cost effective solution. They utilized vinyl/rubber tubing and a simple pressure sensor so that as soon as a change in pressure is detected, the robot stops all movement. The black box in the right picture receives the pressure line and aggregates all the IR sensors to simplify the protocol and wiring to the main controller.
Kiva工程师没有建立全长的凹凸传感器,而众所周知,凹凸传感器很难在机器人前/后表面等弯曲表面上加工,而是找到了一种简单且经济高效的解决方案。他们利用乙烯基/橡胶管和简单的压力传感器,以便一旦检测到压力变化,机器人就会停止所有运动。右图中的黑框接收压力线并聚集所有IR传感器,以简化协议并连接至主控制器。
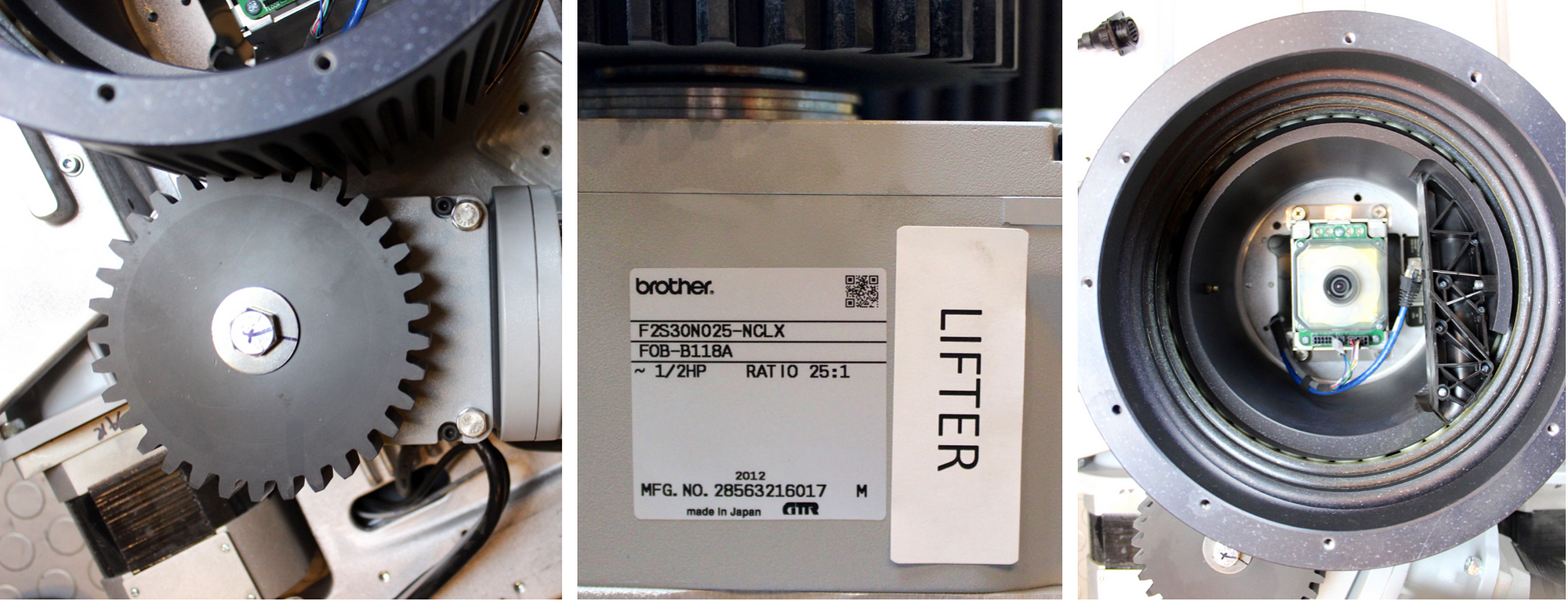 On the left: top view of ball screw and lifter pinion gear. In the middle: side view of lifter motor and gearbox. On the right: center view of the lifter ball screw with imaging module and programming cable inside.The lifter mechanism uses a custom-designed ball screw (the single most complex and expensive component, more on that later) coupled to a standard nylon pinion gear and gearmotor (the same one used for all three axes of motion). The motor is built by Pittman (Ametek) and boasts 27 in-lbs of torque and stall power of almost 1Kw. The right-angle bi-directional gearbox is built by Brother in Japan and can handle 407 in-lbs of torque at 72rpm with a 25:1 reduction. This motor gearbox combo runs into the $1,000 range for a single set (likely much lower at volume). Holy drivetrain, Batman!
On the left: top view of ball screw and lifter pinion gear. In the middle: side view of lifter motor and gearbox. On the right: center view of the lifter ball screw with imaging module and programming cable inside.The lifter mechanism uses a custom-designed ball screw (the single most complex and expensive component, more on that later) coupled to a standard nylon pinion gear and gearmotor (the same one used for all three axes of motion). The motor is built by Pittman (Ametek) and boasts 27 in-lbs of torque and stall power of almost 1Kw. The right-angle bi-directional gearbox is built by Brother in Japan and can handle 407 in-lbs of torque at 72rpm with a 25:1 reduction. This motor gearbox combo runs into the $1,000 range for a single set (likely much lower at volume). Holy drivetrain, Batman!
左侧:滚珠丝杠和升降器小齿轮的俯视图。中间:升降机马达和变速箱的侧视图。右侧:带有成像模块和编程电缆的提升器滚珠丝杠的中心视图。提升机构使用定制设计的滚珠丝杠(单个最复杂,最昂贵的组件,后面会详细介绍),并与标准的尼龙小齿轮和齿轮电动机(用于所有三个运动轴的相同)耦合。该电动机由Pittman(Ametek)制造,并具有27 in-lbs的扭矩和近1Kw的失速功率。直角双向变速箱由日本Brother制造,可在72rpm的转速下以25:1的速度处理407英寸-磅的扭矩。这款电机变速箱组合的单套价格为1,000美元(批量可能更低)。神圣的传动系统,蝙蝠侠!
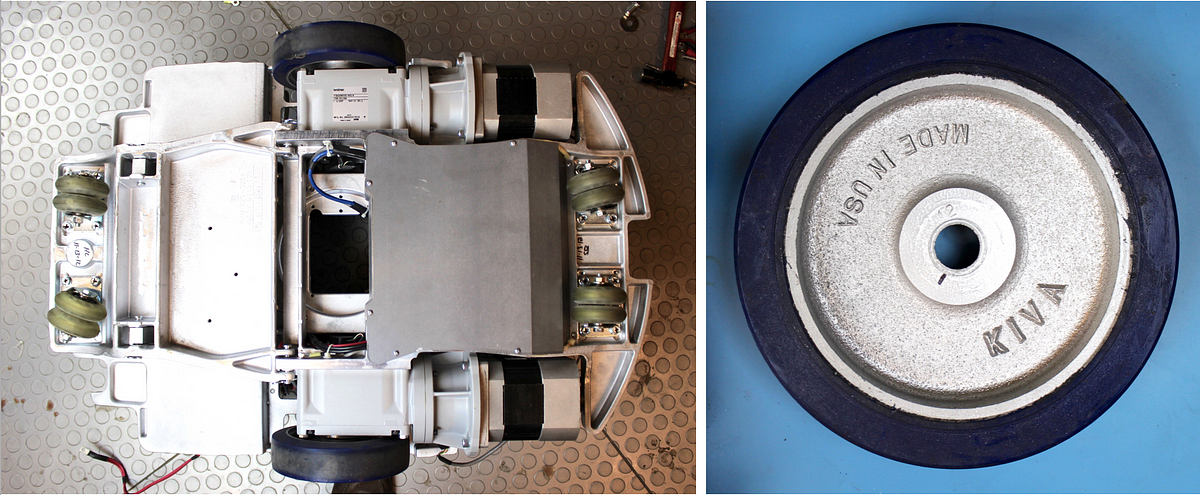 On the left: the underside of our bot, the main logic board is tucked away under that sheet steel panel. On the right: custom cast Kiva wheels likely designed for extreme durability on poured concrete floors.Once the lifter and electronics have been removed, the bot can be flipped over to get a better look at the drivetrain. Here we see the same two motors and gearboxes paired with custom-designed cast Kiva wheels. Flanked on either end are two pairs of dual rollerblade-style 360 degree casters. This drivetrain setup supports zero radius turns.
On the left: the underside of our bot, the main logic board is tucked away under that sheet steel panel. On the right: custom cast Kiva wheels likely designed for extreme durability on poured concrete floors.Once the lifter and electronics have been removed, the bot can be flipped over to get a better look at the drivetrain. Here we see the same two motors and gearboxes paired with custom-designed cast Kiva wheels. Flanked on either end are two pairs of dual rollerblade-style 360 degree casters. This drivetrain setup supports zero radius turns.
左侧:我们机器人的底面,主逻辑板隐藏在该钢板面板下方。右侧:定制的Kiva铸造车轮可能设计为在浇筑的混凝土地板上具有极高的耐用性。卸下升降机和电子设备后,可以将机器人翻转过来,以更好地查看传动系统。在这里,我们看到了相同的两个电动机和变速箱,以及定制设计的铸造Kiva车轮。两侧的两侧是两对双轮滑式360度脚轮。该传动系统设置支持零半径转弯。
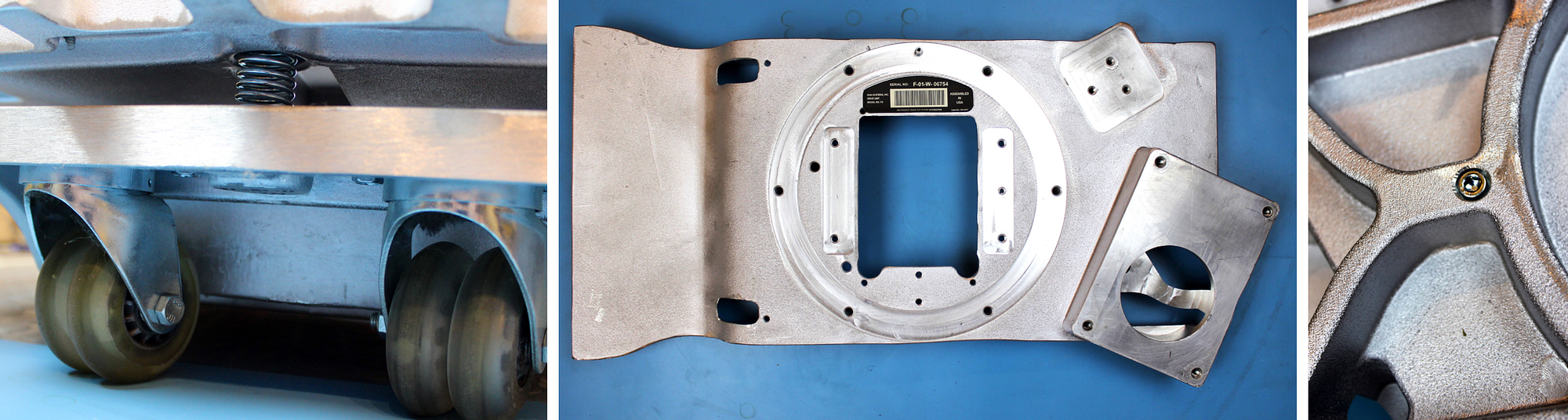
Three sandcast aluminum parts make up the majority of the body and are joined with simple clevis pins to make a simple, passive double suspension action. They all use the same general purpose 319 alloy and are all post-machined after casting. Kiva engineers likely switched to low-pressure aluminum molding with permanent steel tools as production volume increased. Notice the cooling fins on the top of the front casting on the bottom right: the giant MOSFETs for the custom motor control circuits are resting against the backside of those fins for maximum thermal efficiency, a slick design decision.
主体的大部分由三个沙铸铝部件组成,并通过简单的U形销连接,从而实现了简单,被动的双重悬架动作。它们都使用相同的通用319合金,并且都在铸造后进行后加工。随着产量的增加,Kiva的工程师可能会转向使用永久钢工具的低压铝铸件。注意右下方前铸件顶部的散热片:用于定制电机控制电路的巨型MOSFET靠在这些散热片的背面,以实现最大的热效率,这是一个明智的设计决策。
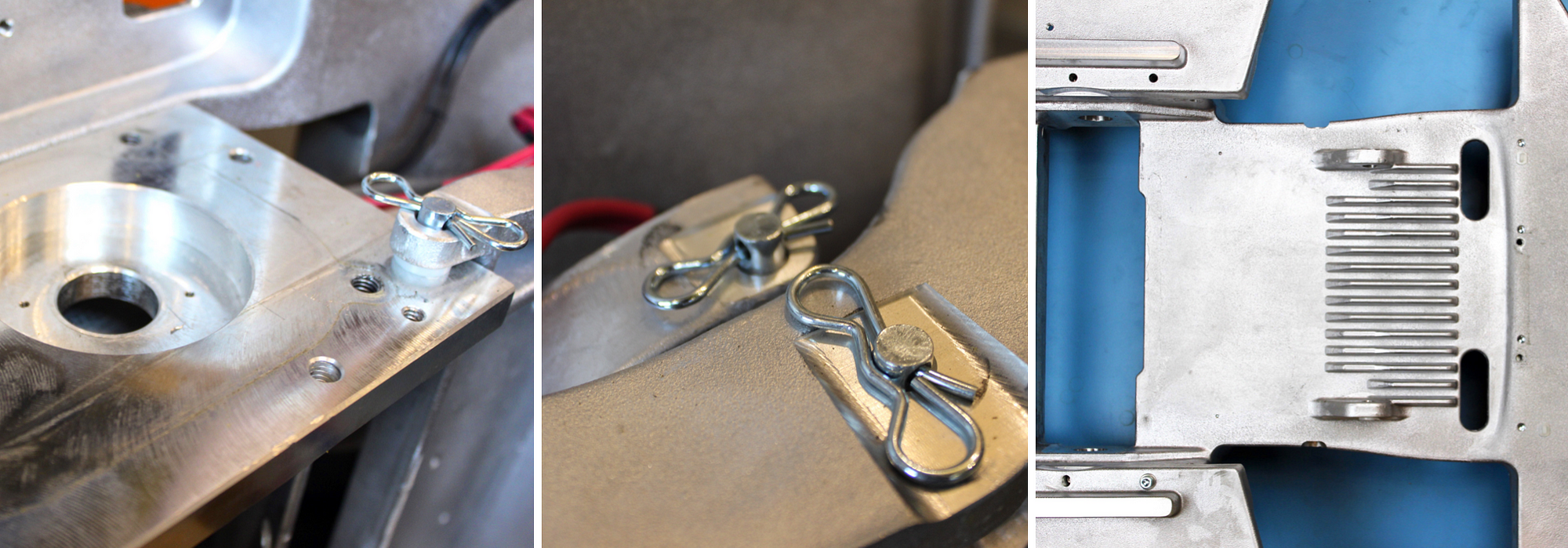
On the left/center: clevis pins are used to simplify the suspension design. On the right: cast-in-place cooling fans opposite the motor controller FETS on the main logic board.### Electronics
Even though Kiva bots have nearly no decision-making authority (each move is controlled by servers in the cloud), movement of the bot while lifting and controlling thousands of pounds of merchandise requires some pretty serious electronics.
在左侧/中央:U形销用于简化悬架设计。右侧:主逻辑板上电机控制器FETS对面的现场冷却风扇。### 电子产品
即使Kiva机器人几乎没有决策权(每个举动都由云中的服务器控制),但机器人机器人在举升和控制数千磅商品的过程中需要一些非常严肃的电子设备。
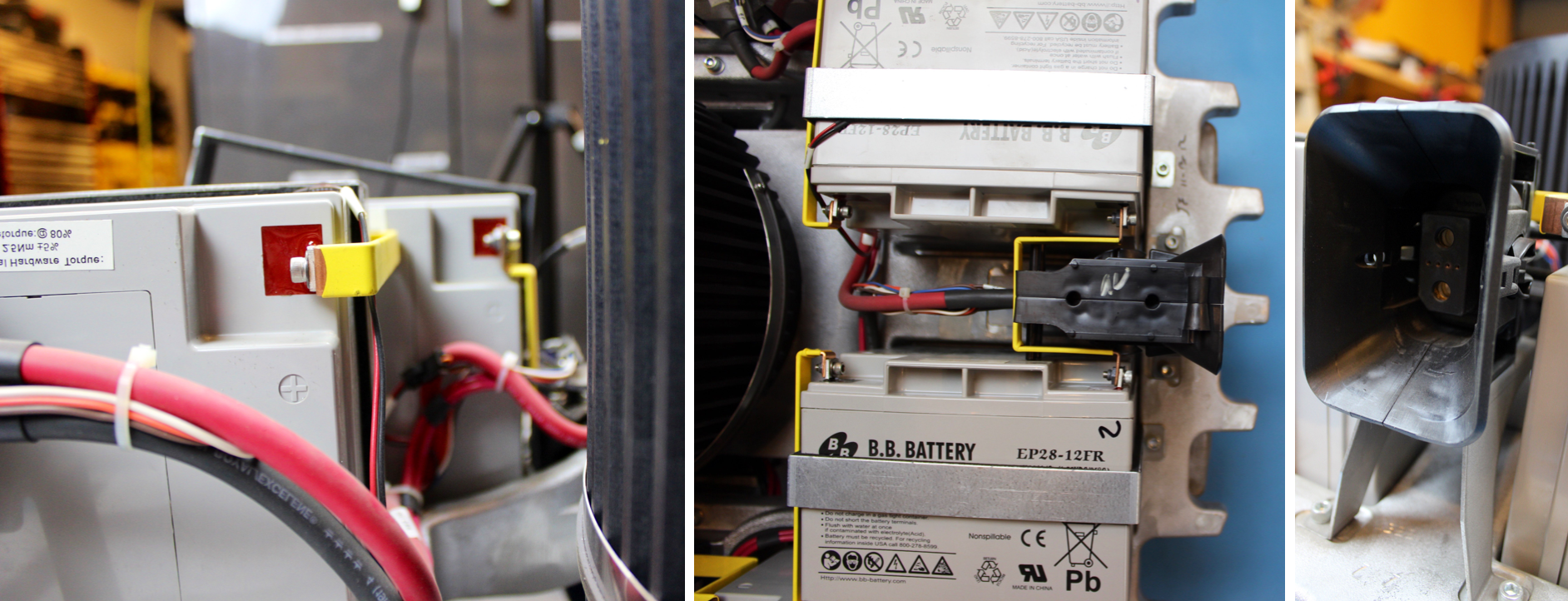 On the left: side view of the battery bus bars with the lifter mechanism in the foreground. In the center: top view of batteries and charging port. On the right: closeup of charging port.The system is powered by four 12v 28Ah lead-acid batteries connected in series (for 48v DC). Two of the four batteries also have custom thermocouples installed under their mounting bracket to ensure they don’t overheat.
On the left: side view of the battery bus bars with the lifter mechanism in the foreground. In the center: top view of batteries and charging port. On the right: closeup of charging port.The system is powered by four 12v 28Ah lead-acid batteries connected in series (for 48v DC). Two of the four batteries also have custom thermocouples installed under their mounting bracket to ensure they don’t overheat.
When the power is running low, bots take themselves offline and return home to a charging station. The design of the charging port allows a good amount of slop in the mating process. I can say from experience, watching one of these bots go home to charge is pretty cool.
左侧:电池汇流排的侧视图,其中升降机构位于前景中。中间:电池和充电端口的俯视图。右侧:充电端口特写。该系统由四个串联的12v 28Ah铅酸电池供电(用于48v DC)。四个电池中的两个在其安装支架下方还安装了定制的热电偶,以确保它们不会过热。
当电量不足时,漫游器会使自己脱机并返回充电站。充电端口的设计在配合过程中允许大量倾斜。我可以根据经验说,看着这些机器人之一回家充电很酷。
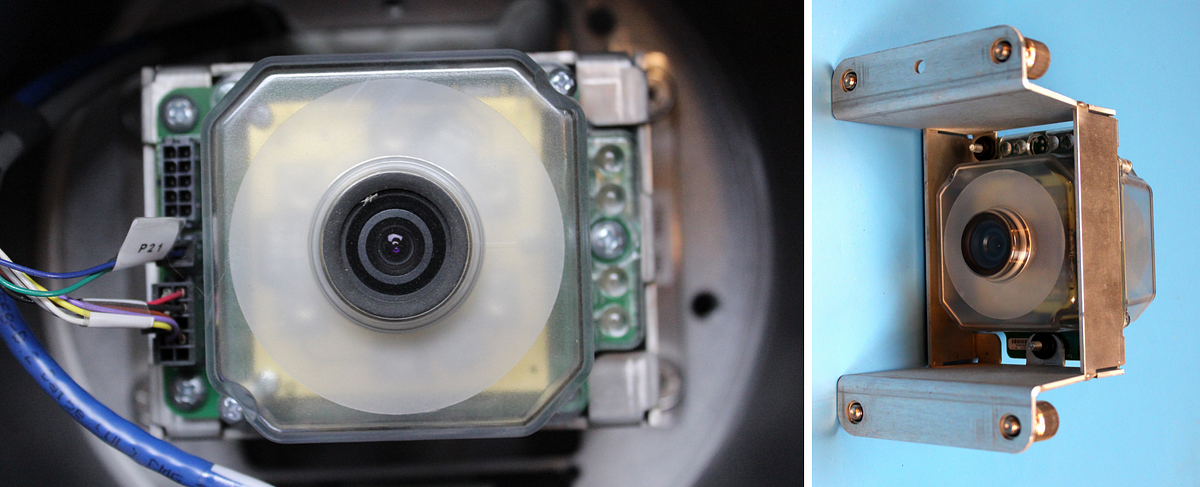 On the left: top-facing imager inside the lifter ball screw. On the right: bottom-facing imager once imaging unit is removed.Tucked inside the lifter mechanism is one of the key enablers of the Kiva system: a dual-camera imaging module. One camera looks down at the ground to recognize 2D barcodes on the warehouse floor. The other looks upwards at the bottom of every pod. Each has 6 on-board red LEDs for illumination and like the rest of the robot, everything is custom designed. Sandwiched between the two imagers is an image processing board sporting an ADI ADSP-BF548 Blackfin multimedia processor which is doing the Datamatrix detection and relaying results via high-speed serial.
On the left: top-facing imager inside the lifter ball screw. On the right: bottom-facing imager once imaging unit is removed.Tucked inside the lifter mechanism is one of the key enablers of the Kiva system: a dual-camera imaging module. One camera looks down at the ground to recognize 2D barcodes on the warehouse floor. The other looks upwards at the bottom of every pod. Each has 6 on-board red LEDs for illumination and like the rest of the robot, everything is custom designed. Sandwiched between the two imagers is an image processing board sporting an ADI ADSP-BF548 Blackfin multimedia processor which is doing the Datamatrix detection and relaying results via high-speed serial.
左侧:升降器滚珠丝杠内的顶部成像仪。右侧:卸下成像单元后,底部朝下的成像器。Kiva系统的主要促成因素之一是装在升降机机构内部:双摄像头成像模块。一台摄像机向下看地面,以识别仓库地板上的二维条形码。另一个在每个吊舱的底部向上看。每个机器人都有6个板上红色LED照明,并且像机器人的其余部分一样,所有部件都是定制设计的。图像处理板夹在两个成像器之间,带有ADI ADSP-BF548 Blackfin多媒体处理器,该处理器通过高速串行进行Datamatrix检测和中继结果。
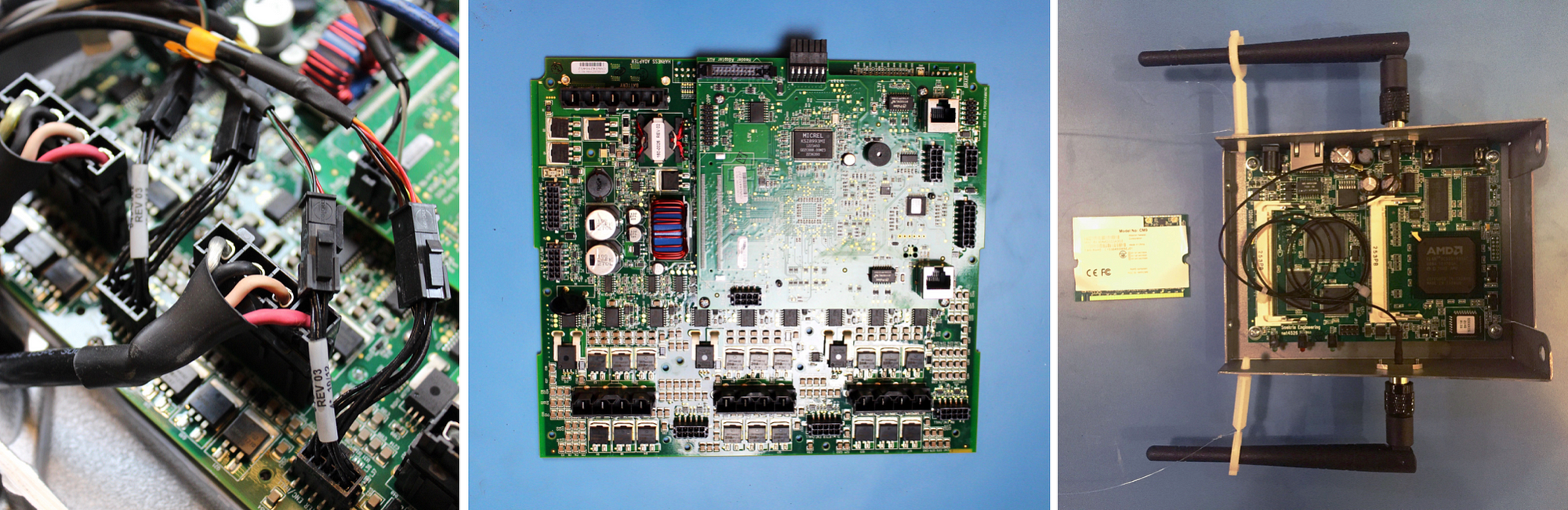 On the left: main logic board installed with a plethora of connectors. In the center: logic board removed with CPU daughterboard in the top right corner. On the right: communications module and antennas.Tying everything together is the main logic board. Motor control circuitry is powered by 48V DC from the batteries and a separate filtered rail powers the logic/communications/CPU. The 3 phase brushless motor drive electronics are fully custom, driven by a Lattice LFXP6C FPGA (hidden under the daughterboard). Each of the three driver circuits has a current sensor, 6 high-amp FETs in full-bridge configuration (and are cooled via the chassis), input for a motor’s rotary encoder, and the giant 4-pin connector.
On the left: main logic board installed with a plethora of connectors. In the center: logic board removed with CPU daughterboard in the top right corner. On the right: communications module and antennas.Tying everything together is the main logic board. Motor control circuitry is powered by 48V DC from the batteries and a separate filtered rail powers the logic/communications/CPU. The 3 phase brushless motor drive electronics are fully custom, driven by a Lattice LFXP6C FPGA (hidden under the daughterboard). Each of the three driver circuits has a current sensor, 6 high-amp FETs in full-bridge configuration (and are cooled via the chassis), input for a motor’s rotary encoder, and the giant 4-pin connector.
The daughterboard aggregates system functions by coordinating the wireless module, imaging unit, e-stop, infrared/pressure sensors, power management, and the motor drivers. The MCU is a 32-bit Freescale MPC5123 with a 400MHz clock likely running PowerPC Linux (on bare metal). The two ethernet ports connect to the wireless module and firmware flashing/external hardline connection, but they’re switched by a Mircel KSZ8993.
The only off-the-shelf circuitry on the entire robot is the communications module: the Soekris Engineering Net4526 router which sports a single Winstron NeWeb CM9 wireless module in a dual-antenna configuration, connected to the main logic board via ethernet.
左侧:安装有大量连接器的主逻辑板。在中间:卸下了逻辑板,并在右上角卸下了CPU子板。右侧:通信模块和天线。将所有东西捆绑在一起是主要的逻辑板。电机控制电路由电池提供的48V DC电源供电,并为逻辑/通信/ CPU提供独立的滤波轨。三相无刷电机驱动电子设备是完全定制的,由莱迪思LFXP6C FPGA(隐藏在子板下方)驱动。这三个驱动器电路中的每一个都有一个电流传感器,6个全桥配置的高电流FET(并通过机箱冷却),电机旋转编码器的输入以及巨型4针连接器。
子板通过协调无线模块,成像单元,急停,红外/压力传感器,电源管理和电机驱动器来汇总系统功能。该MCU是32位飞思卡尔MPC5123,具有400MHz时钟,可能运行PowerPC Linux(在裸机上)。这两个以太网端口连接到无线模块和固件闪烁/外部硬线连接,但是它们由Mircel KSZ8993切换。
整个机器人上唯一现成的电路是通信模块:Soekris Engineering Net4526路由器,该路由器具有双天线配置的单个Winstron NeWeb CM9无线模块,并通过以太网连接到主逻辑板。
The Magic Component 魔术组成
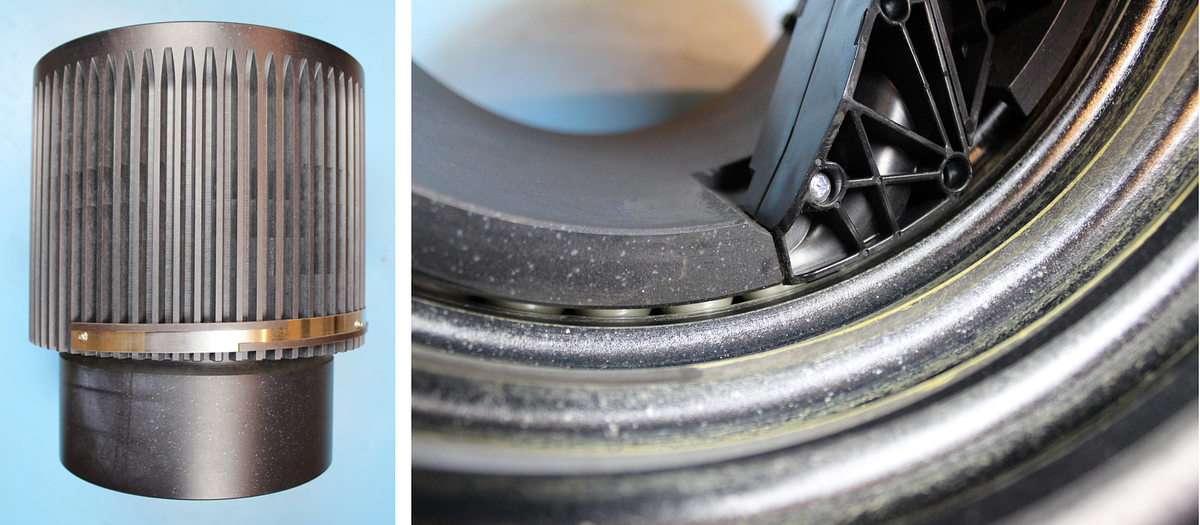
While there are many fascinating and brilliantly executed aspects to this generation of Kiva bot, one subsystem takes the cake: the lifter mechanism. This part does the literal heavy lifting for the Kiva system. It must be able to support a thousand-pound load while raising and lowering them perfectly parallel to the ground: a perfect task for a ball screw. Most ball screws are an inch or two in diameter, this is 11″ and hollow.
The two case bearing surfaces are aluminum and just like the main chassis parts, require several secondary machining operations during fabrication. Both parts are coated with a Teflon-impregnated anodization which I’ve never seen before but does a great job of providing lubrication and rust resistance. The “ball nut” (what is really an inner race) houses an injection molded ball return mechanism which recycles the nylon/delrin ball bearings. The “screw” (which is really an outer race) interfaces with both ball bearings on the inside and the pinion gear on the outside during the actual rotation/lifting operation.
While it’s difficult to estimate the cost of the lifter assembly due to the complexity, my guess pegs the value somewhere in the $1,000-range based on the part size, post-processing, coating, durability requirements, and non-trivial assembly process.
尽管这一代Kiva机器人有许多引人入胜且执行出色的方面,但其中一个子系统是蛋糕:举升机构。这部分为Kiva系统做了字面上的繁重工作。它必须能够支撑一千磅的负载,同时完全平行于地面升降,这对滚珠丝杠来说是一项完美的任务。大多数滚珠丝杠的直径为一英寸或两英寸,直径为11英寸,并且是空心的。
两个外壳轴承表面是铝,就像底盘的主要部件一样,在制造过程中需要进行几次辅助加工。这两部分都涂有特氟隆浸渍的阳极氧化膜,这是我以前从未见过的,但是在提供润滑性和防锈性方面做得很好。“滚珠螺母”(实际上是一个内圈)装有一个注模滚珠返回机构,该机构可以回收尼龙/ delrin滚珠轴承。在实际的旋转/提升操作过程中,“螺钉”(实际上是外圈)与内侧的滚珠轴承以及外侧的小齿轮连接。
虽然由于复杂性而难以估算升降机的成本,但我的猜测是根据零件尺寸,后处理,涂层,耐用性要求和非平凡的装配工艺,将价格固定在1,000美元左右。
的系统。
Conclusion 结论
It’s clear Kiva Systems employs some pretty fantastic hardware engineers, which is probably a big part of the reason Amazon acquired the company in 2012 for $775M. This article admittedly focuses entirely on the robot, which is just one small (and really freaking cool) part of the greater solution.
In the hardware startup world, we spend a lot of time thinking and talking about consumer robots in our daily lives. Robots that will cook our food, schedule our meetings, vacuum our floors etc. I’d argue that less-sexy robots like Kiva are already impacting our daily lives more than most of us know. As e-commerce continues to grow, technologies like Kiva will be a driving force in changing the dynamics of the warehouses and distribution centers that are so critical to satiating our desire for break-neck fulfillment. Kiva is one of the few companies that masterfully integrates complex hardware and software into a seamless solution and has built a system that dramatically shapes the way we buy, sell, and live.
显然,Kiva Systems雇用了一些非常出色的硬件工程师,这很可能是亚马逊在2012年以7.75亿美元收购该公司的重要原因。诚然,本文完全集中在机器人上,它只是较大解决方案的一小部分(而且确实很酷)。
在硬件启动世界中,我们花费大量时间思考和讨论日常生活中的消费机器人。可以烹饪食物,安排会议时间,给地板打扫卫生的机器人。我认为像Kiva这样不那么性感的机器人已经对我们的日常生活产生了比我们大多数人所知道的更大的影响。随着电子商务的持续发展,像Kiva这样的技术将成为改变仓库和配送中心动态的驱动力,而这对于满足我们对突破性实现的需求至关重要。Kiva是为数不多的几家将复杂的硬件和软件巧妙地集成到一个无缝解决方案中的公司之一,并且该公司构建了一个可以显着改变我们的购买,销售和生活方式